ManiTaskGen: A Comprehensive Task Generator for Benchmarking and Improving Vision-Language Agents on Embodied Decision-Making
University of California San Diego, USA
*Equal contribution
Overview
ManiTaskGen is a universal system that generates a comprehensive set of feasible mobile manipulation tasks given arbitrary scenes. These tasks facilitate both benchmarking and the improvement of embodied decision-making agents.
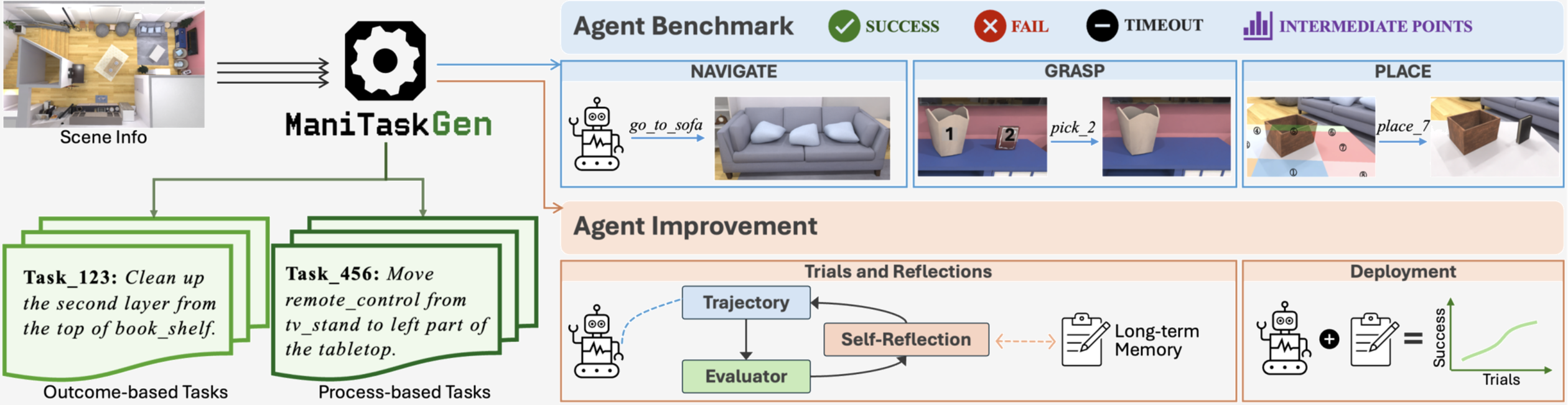
Task Generation Pipeline
Pipeline Overview
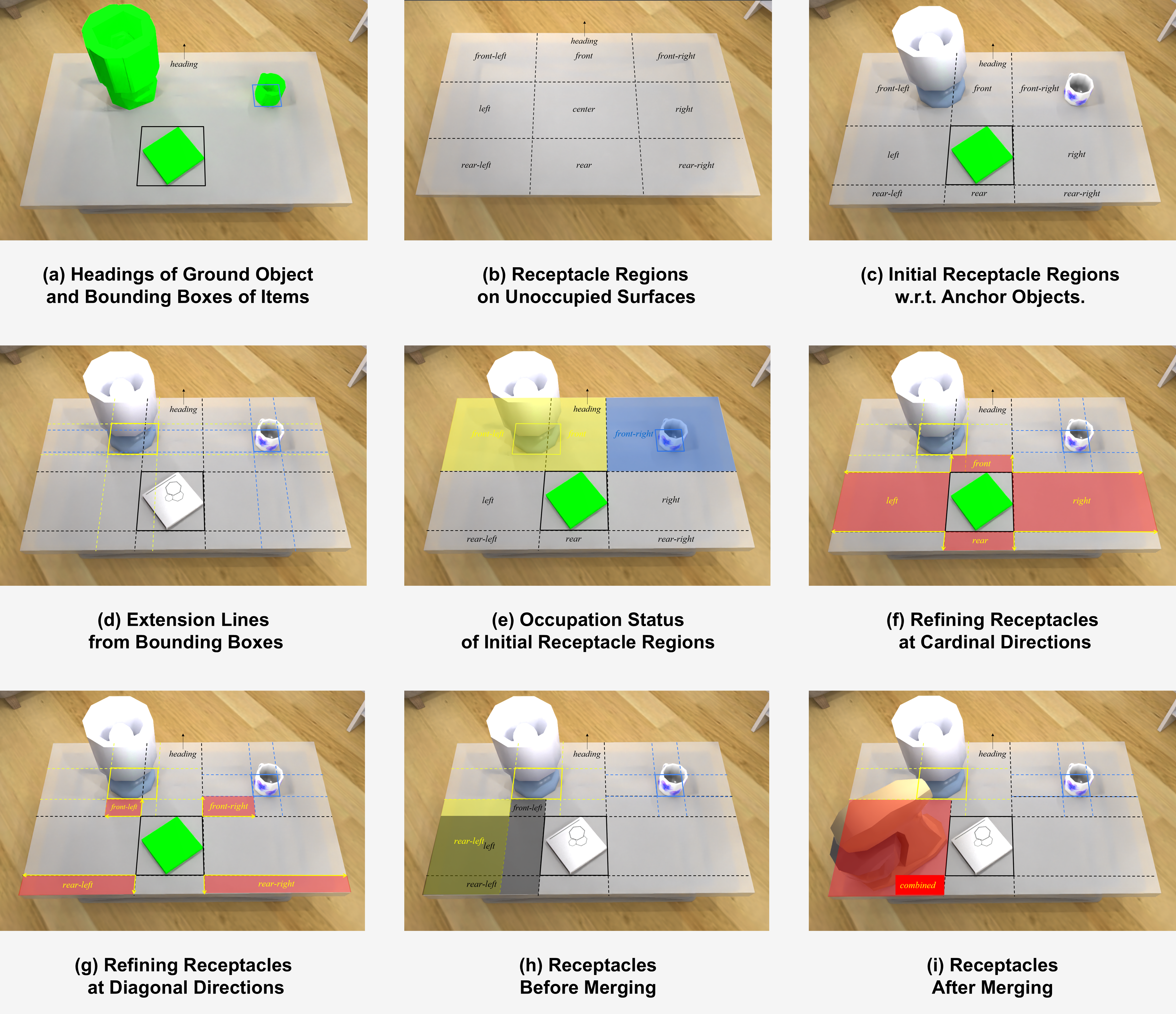
Step 1: Construct Receptacle-Aware 3D Scene Graph
We build a receptacle-aware 3D scene graph 𝒮 that captures the spatial relationships between objects and receptacles around each object. Below we visualize the rules to build the scene graph.
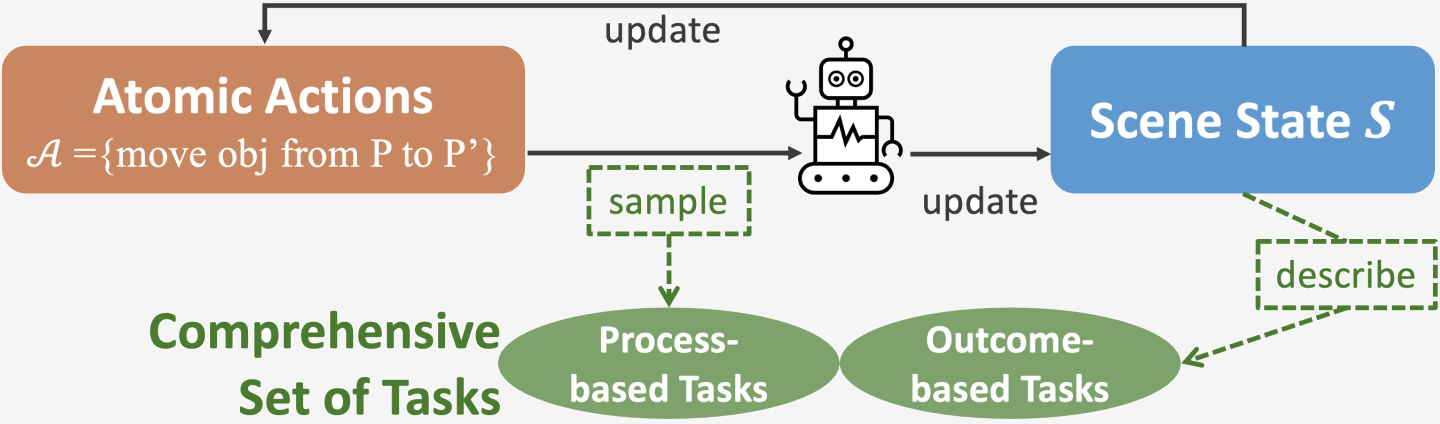
Step 2: Generate Process- and Outcome-based Tasks
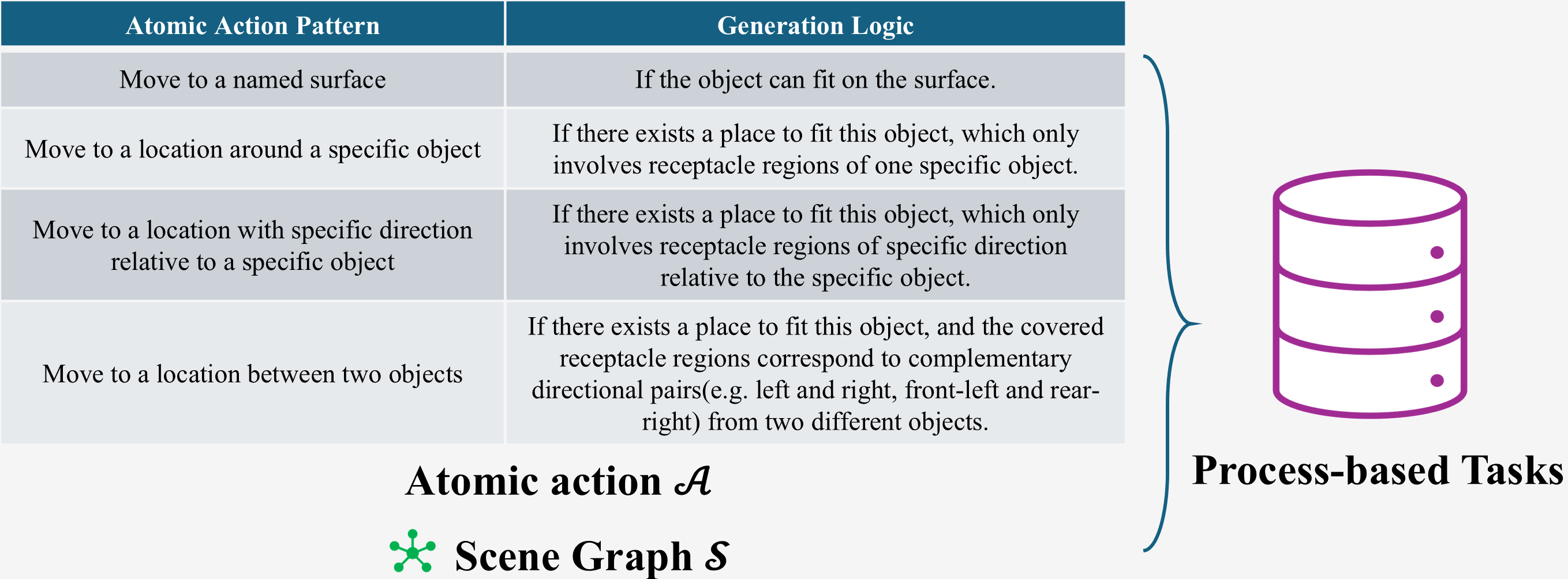
Process-based Tasks
For process-based tasks, we generate them through the use of our scene graph and some patterns.
Outcome-based Tasks
For outcome-based tasks, we employ a hybrid approach combining template-based generation and VLM-based filtering.
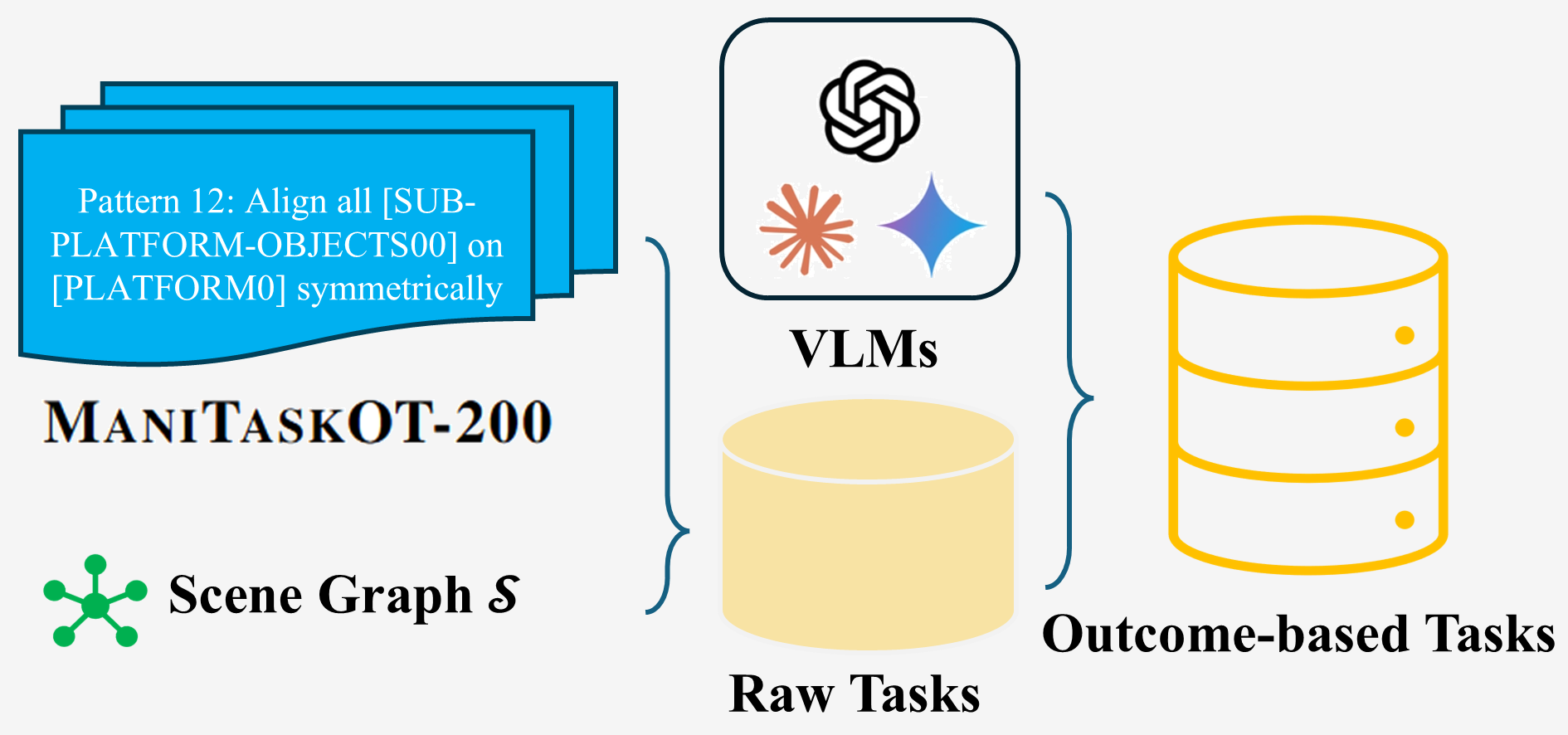
Below are "lightmaps" that visualize the diversity of generated tasks. Each time an object or location is specifically mentioned in a task, a corresponding highlight is added at the precise position. This “heatmap” reveals the effect of our method by the comparison of brightness intensity and distribution.

ManiTaskGen Applications
Benchmarking VLM Agents on Embodied Decision-Making
Agent Action Space
Goto
Change View
Pick
Show Receptacle
Place_r
Place_s
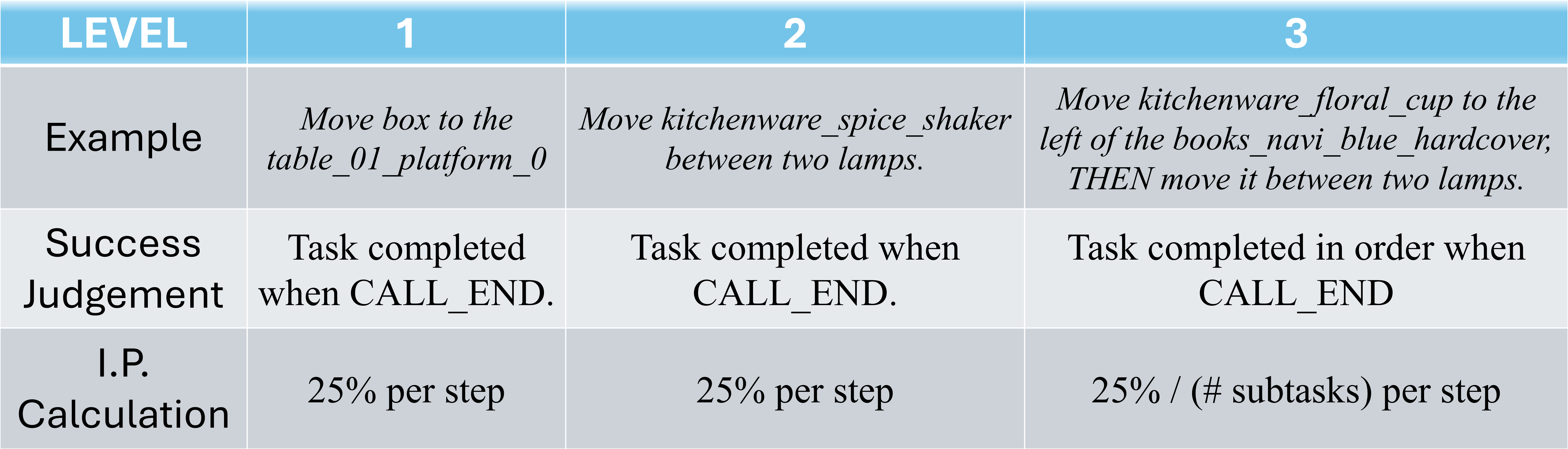
Task Difficulty and Evaluation Criteria
We divide all process-based tasks into 3 difficulty levels. The evaluation criteria is defined as below.
Episode Examples
Visualization of an episode is displayed in the video below.
Full history of episodes is displayed in the container below.
Examples
Move kitchenware_white_paper_towel_holder between lighting_blue_base_table_lamp and lighting_blue_base_table_lamp
(Success Episode by Claude-3.7-sonnet)
Move Remote to Bowl's rear-left receptacles
(Failed Episode by Gemini-2.5-pro)
You are a household assistant robot equipped with a vision system and manipulation capabilities. You need to complete a task in a 3D environment, mainly involving moving, picking up, and placing objects. Your goal is to move an object from one place to another correctly according to instructions. Please strictly follow the given Action Space for operations.
At the beginning of each task, you will be informed of a specific task to complete. Throughout the task execution, you will transition between multiple states and have access to a set of possible actions (action space).
You may receive one of the following task types involving one object and another object or a platform. ({an object/another object/a platform} are the name of objects or platforms, {dir} is one of the 8 directions):
- move {an object} to {a platform}.
- move {an object} to the {dir} of {a platform}.
- move {an object} around {another object}.
- move {an object} to the {dir} of {another object}.
- move {an object} between {another object} and {yet another object}.
[expand - Understanding directions]
Understanding directions:
Directions like 'front', 'rear', 'left', and 'right' are defined relative to the robot's perspective and the heading of the object or platform you are interacting with. The heading of a ground object is not fixed and depends on where the robot is standing and facing.
Empty Surfaces (Platforms): When interacting with an empty platform, imagine it divided into a 3x3 grid. The direction aligned with the heading (also, the FARTHEST middle space to you, NOT THE NEAREST MIDDLE SPACE) is labeled "front," with the remaining regions proceeding counterclockwise as "front-left," "left," "rear-left," "rear," "rear-right," "right," and "front-right." The grid is conceptually numbered as follows, based on these directions:
[front-left, front, front-right],
[left, center, right],
[rear-left, rear, rear-right]
Occupied Surfaces (Objects on Platforms): For objects on platforms, imagine extending the edges of the object's bounding box to the platform's boundaries. The resulting regions define the object's 8 receptacles, and the direction is defined similarly.
[expand - Task success criteria]
- move {an object} to {a platform}: The task is considered successful only when {an object} is placed anywhere on the specified platform.
- move {an object} to the {dir} of {a platform}: The task is considered successful only when {an object} is placed on the platform and the geometric center of the placement is in the {dir} direction relative to the platform.
- move {an object} around {another object}: The task is considered successful only when {an object} is placed in any of the receptacles surrounding {another object}.
- move {an object} to the {dir} of {another object}: The task is considered successful only when {an object} is placed in the receptacles surrounding {another object} and overlaps with the {dir} direction.
- move {an object} between {another object} and {yet another object}: The task is considered successful only when {an object} is placed such that it intersects with receptacles in a pair of opposite directions between {another object} and {yet another object}.

The task involves identical objects. To help you distinguish them, we have provided images of the relevant objects.
Current task:
Move kitchenware_white_paper_towel_holder between lighting_blue_base_table_lamp and lighting_blue_base_table_lamp
Initially, kitchenware_white_paper_towel_holder is on object_kitchen_counter_1_body_platform_1, and lighting_blue_base_table_lamp is on object_table_02_40_platform_2, together with lighting_blue_base_table_lamp.
Steps used: 0/20. You can only take at most 20 steps, so hurry if you've almost used all of them!
Your available action space:
- End action: CALL_END (Call end - terminate the task)
- Navigation actions: ['go_to_object_sofa_10_platform_0', 'go_to_object_sofa_10_platform_1', 'go_to_object_sofa_10_platform_2', 'go_to_object_table_04_13_platform_0', 'go_to_object_chair_04_46_platform_0', 'go_to_object_chair_04_47_platform_0', 'go_to_object_chair_05_7_platform_0', 'go_to_object_chair_05_8_platform_0', 'go_to_object_stool_02_18_platform_0', 'go_to_object_stool_02_6_platform_0', 'go_to_object_rack_01_75_platform_0', 'go_to_object_rack_01_75_platform_1', 'go_to_object_rack_01_75_platform_2', 'go_to_object_kitchen_counter_1_body_platform_0', 'go_to_object_kitchen_counter_1_body_platform_1', 'go_to_object_fridge_0_body_platform_1', 'go_to_object_fridge_0_body_platform_3', 'go_to_object_fridge_0_body_platform_4', 'go_to_object_fridge_0_body_platform_5', 'go_to_object_fridge_0_body_platform_6', 'go_to_object_fridge_0_body_platform_7', 'go_to_object_bin_03_3_platform_0', 'go_to_object_wall_cabinet_01_4_platform_0', 'go_to_object_wall_cabinet_01_4_platform_1', 'go_to_object_wall_cabinet_01_4_platform_2', 'go_to_object_wall_cabinet_01_4_platform_3', 'go_to_object_wall_cabinet_01_4_platform_4', 'go_to_object_wall_cabinet_01_4_platform_5', 'go_to_object_wall_cabinet_01_4_platform_6', 'go_to_object_table_03_14_platform_1', 'go_to_object_table_01_48_platform_0', 'go_to_object_wall_cabinet_02_21_platform_0', 'go_to_object_wall_cabinet_02_21_platform_1', 'go_to_object_wall_cabinet_02_21_platform_2', 'go_to_object_wall_cabinet_02_21_platform_3', 'go_to_object_wall_cabinet_02_21_platform_4', 'go_to_object_wall_cabinet_02_21_platform_5', 'go_to_object_wall_cabinet_02_21_platform_6', 'go_to_object_chestOfDrawers_01_2_body_platform_0', 'go_to_object_chestOfDrawers_01_2_body_platform_1', 'go_to_object_chestOfDrawers_01_2_body_platform_2', 'go_to_object_chestOfDrawers_01_2_body_platform_3', 'go_to_object_chestOfDrawers_01_2_body_platform_4', 'go_to_object_chestOfDrawers_01_2_body_platform_5', 'go_to_object_chestOfDrawers_01_2_body_platform_6', 'go_to_object_table_02_40_platform_0', 'go_to_object_table_02_40_platform_1', 'go_to_object_table_02_40_platform_2', 'go_to_object_tvstand_88_platform_0', 'go_to_object_cabinet_3_body_platform_0', 'go_to_object_cabinet_3_body_platform_1']
VLM Response: go_to_object_kitchen_counter_1_body_platform_1

You are currently at object_kitchen_counter_1_body_platform_1.
And you are holding nothing.
Steps used: 1/20. You can only take at most 20 steps, so hurry if you've almost used all of them!
Your available action space:
- Navigation actions: ['go_to_object_sofa_10_platform_0', 'go_to_object_sofa_10_platform_1', 'go_to_object_sofa_10_platform_2', 'go_to_object_table_04_13_platform_0', 'go_to_object_chair_04_46_platform_0', 'go_to_object_chair_04_47_platform_0', 'go_to_object_chair_05_7_platform_0', 'go_to_object_chair_05_8_platform_0', 'go_to_object_stool_02_18_platform_0', 'go_to_object_stool_02_6_platform_0', 'go_to_object_rack_01_75_platform_0', 'go_to_object_rack_01_75_platform_1', 'go_to_object_rack_01_75_platform_2', 'go_to_object_kitchen_counter_1_body_platform_0', 'go_to_object_kitchen_counter_1_body_platform_1', 'go_to_object_fridge_0_body_platform_1', 'go_to_object_fridge_0_body_platform_3', 'go_to_object_fridge_0_body_platform_4', 'go_to_object_fridge_0_body_platform_5', 'go_to_object_fridge_0_body_platform_6', 'go_to_object_fridge_0_body_platform_7', 'go_to_object_bin_03_3_platform_0', 'go_to_object_wall_cabinet_01_4_platform_0', 'go_to_object_wall_cabinet_01_4_platform_1', 'go_to_object_wall_cabinet_01_4_platform_2', 'go_to_object_wall_cabinet_01_4_platform_3', 'go_to_object_wall_cabinet_01_4_platform_4', 'go_to_object_wall_cabinet_01_4_platform_5', 'go_to_object_wall_cabinet_01_4_platform_6', 'go_to_object_table_03_14_platform_1', 'go_to_object_table_01_48_platform_0', 'go_to_object_wall_cabinet_02_21_platform_0', 'go_to_object_wall_cabinet_02_21_platform_1', 'go_to_object_wall_cabinet_02_21_platform_2', 'go_to_object_wall_cabinet_02_21_platform_3', 'go_to_object_wall_cabinet_02_21_platform_4', 'go_to_object_wall_cabinet_02_21_platform_5', 'go_to_object_wall_cabinet_02_21_platform_6', 'go_to_object_chestOfDrawers_01_2_body_platform_0', 'go_to_object_chestOfDrawers_01_2_body_platform_1', 'go_to_object_chestOfDrawers_01_2_body_platform_2', 'go_to_object_chestOfDrawers_01_2_body_platform_3', 'go_to_object_chestOfDrawers_01_2_body_platform_4', 'go_to_object_chestOfDrawers_01_2_body_platform_5', 'go_to_object_chestOfDrawers_01_2_body_platform_6', 'go_to_object_table_02_40_platform_0', 'go_to_object_table_02_40_platform_1', 'go_to_object_table_02_40_platform_2', 'go_to_object_tvstand_88_platform_0', 'go_to_object_cabinet_3_body_platform_0', 'go_to_object_cabinet_3_body_platform_1']
- Pick object actions: ['pick_object_1_of_current_platform', 'pick_object_2_of_current_platform', 'pick_object_3_of_current_platform', 'pick_object_4_of_current_platform', 'pick_object_5_of_current_platform', 'pick_object_6_of_current_platform', 'pick_object_7_of_current_platform', 'pick_object_8_of_current_platform', 'pick_object_9_of_current_platform', 'pick_object_10_of_current_platform', 'pick_object_11_of_current_platform', 'pick_object_12_of_current_platform', 'pick_object_13_of_current_platform', 'pick_object_14_of_current_platform', 'pick_object_15_of_current_platform', 'pick_object_16_of_current_platform', 'pick_object_17_of_current_platform', 'pick_object_18_of_current_platform', 'pick_object_19_of_current_platform', 'pick_object_20_of_current_platform', 'pick_object_21_of_current_platform', 'pick_object_22_of_current_platform', 'pick_object_23_of_current_platform', 'pick_object_24_of_current_platform', 'pick_object_25_of_current_platform', 'pick_object_26_of_current_platform']
- Show receptacle actions: ['show_receptacle_of_object_1_of_current_platform', 'show_receptacle_of_object_2_of_current_platform', 'show_receptacle_of_object_3_of_current_platform', 'show_receptacle_of_object_4_of_current_platform', 'show_receptacle_of_object_5_of_current_platform', 'show_receptacle_of_object_6_of_current_platform', 'show_receptacle_of_object_7_of_current_platform', 'show_receptacle_of_object_8_of_current_platform', 'show_receptacle_of_object_9_of_current_platform', 'show_receptacle_of_object_10_of_current_platform', 'show_receptacle_of_object_11_of_current_platform', 'show_receptacle_of_object_12_of_current_platform', 'show_receptacle_of_object_13_of_current_platform', 'show_receptacle_of_object_14_of_current_platform', 'show_receptacle_of_object_15_of_current_platform', 'show_receptacle_of_object_16_of_current_platform', 'show_receptacle_of_object_17_of_current_platform', 'show_receptacle_of_object_18_of_current_platform', 'show_receptacle_of_object_19_of_current_platform', 'show_receptacle_of_object_20_of_current_platform', 'show_receptacle_of_object_21_of_current_platform', 'show_receptacle_of_object_22_of_current_platform', 'show_receptacle_of_object_23_of_current_platform', 'show_receptacle_of_object_24_of_current_platform', 'show_receptacle_of_object_25_of_current_platform', 'show_receptacle_of_object_26_of_current_platform']
- Other actions: CALL_END (Call end - terminate the task), change_view (Change the viewing angle to observe the scene from another perspective)
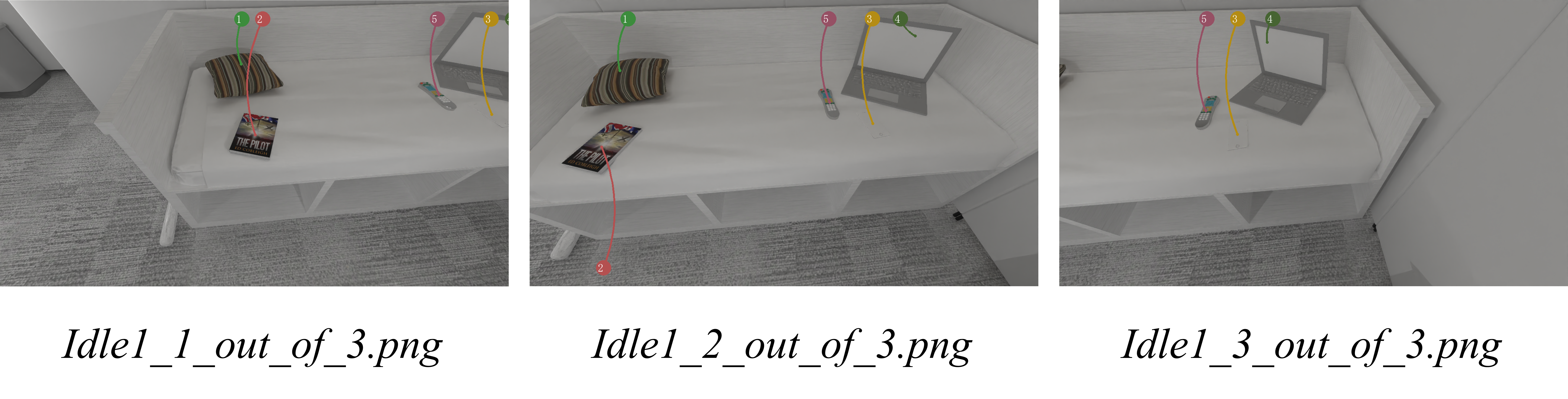
Here are 4 images, named ['Idle_1_1_out_of_4.png', 'Idle_1_2_out_of_4.png', 'Idle_1_3_out_of_4.png', 'Idle_1_4_out_of_4.png'] respectively.
Their description is as follows: These images show the platform you are currently on in one view, with regions or objects marked with numbers for you to place objects accurately. The platform is object_kitchen_counter_1_body_platform_1.
If the platform has no objects, a 3x3 grid will be marked on the platform to help you place objects, with each grid marked in numbers from 1 to 9. If there are objects on the platform, guiding lines will indicate the object numbers. Note that if you see multiple images, it means the platform is too long to be captured in one image, and it's guaranteed that the same object will marked in THE SAME COLOR GUIDELINES AND THE SAME NUMBER. If you think you can't determine the number of an item in one picture, you can go through other pictures and see if this item is marked more clearly.
VLM Response: change_view

Unable to rotate to another view. The platform you at only have 1 walkable place for you.
You are currently at object_kitchen_counter_1_body_platform_1.
And you are holding nothing.
Steps used: 2/20. You can only take at most 20 steps, so hurry if you've almost used all of them!
Your available action space:
- Navigation actions: ['go_to_object_sofa_10_platform_0', 'go_to_object_sofa_10_platform_1', 'go_to_object_sofa_10_platform_2', 'go_to_object_table_04_13_platform_0', 'go_to_object_chair_04_46_platform_0', 'go_to_object_chair_04_47_platform_0', 'go_to_object_chair_05_7_platform_0', 'go_to_object_chair_05_8_platform_0', 'go_to_object_stool_02_18_platform_0', 'go_to_object_stool_02_6_platform_0', 'go_to_object_rack_01_75_platform_0', 'go_to_object_rack_01_75_platform_1', 'go_to_object_rack_01_75_platform_2', 'go_to_object_kitchen_counter_1_body_platform_0', 'go_to_object_kitchen_counter_1_body_platform_1', 'go_to_object_fridge_0_body_platform_1', 'go_to_object_fridge_0_body_platform_3', 'go_to_object_fridge_0_body_platform_4', 'go_to_object_fridge_0_body_platform_5', 'go_to_object_fridge_0_body_platform_6', 'go_to_object_fridge_0_body_platform_7', 'go_to_object_bin_03_3_platform_0', 'go_to_object_wall_cabinet_01_4_platform_0', 'go_to_object_wall_cabinet_01_4_platform_1', 'go_to_object_wall_cabinet_01_4_platform_2', 'go_to_object_wall_cabinet_01_4_platform_3', 'go_to_object_wall_cabinet_01_4_platform_4', 'go_to_object_wall_cabinet_01_4_platform_5', 'go_to_object_wall_cabinet_01_4_platform_6', 'go_to_object_table_03_14_platform_1', 'go_to_object_table_01_48_platform_0', 'go_to_object_wall_cabinet_02_21_platform_0', 'go_to_object_wall_cabinet_02_21_platform_1', 'go_to_object_wall_cabinet_02_21_platform_2', 'go_to_object_wall_cabinet_02_21_platform_3', 'go_to_object_wall_cabinet_02_21_platform_4', 'go_to_object_wall_cabinet_02_21_platform_5', 'go_to_object_wall_cabinet_02_21_platform_6', 'go_to_object_chestOfDrawers_01_2_body_platform_0', 'go_to_object_chestOfDrawers_01_2_body_platform_1', 'go_to_object_chestOfDrawers_01_2_body_platform_2', 'go_to_object_chestOfDrawers_01_2_body_platform_3', 'go_to_object_chestOfDrawers_01_2_body_platform_4', 'go_to_object_chestOfDrawers_01_2_body_platform_5', 'go_to_object_chestOfDrawers_01_2_body_platform_6', 'go_to_object_table_02_40_platform_0', 'go_to_object_table_02_40_platform_1', 'go_to_object_table_02_40_platform_2', 'go_to_object_tvstand_88_platform_0', 'go_to_object_cabinet_3_body_platform_0', 'go_to_object_cabinet_3_body_platform_1']
- Pick object actions: ['pick_object_1_of_current_platform', 'pick_object_2_of_current_platform', 'pick_object_3_of_current_platform', 'pick_object_4_of_current_platform', 'pick_object_5_of_current_platform', 'pick_object_6_of_current_platform', 'pick_object_7_of_current_platform', 'pick_object_8_of_current_platform', 'pick_object_9_of_current_platform', 'pick_object_10_of_current_platform', 'pick_object_11_of_current_platform', 'pick_object_12_of_current_platform', 'pick_object_13_of_current_platform', 'pick_object_14_of_current_platform', 'pick_object_15_of_current_platform', 'pick_object_16_of_current_platform', 'pick_object_17_of_current_platform', 'pick_object_18_of_current_platform', 'pick_object_19_of_current_platform', 'pick_object_20_of_current_platform', 'pick_object_21_of_current_platform', 'pick_object_22_of_current_platform', 'pick_object_23_of_current_platform', 'pick_object_24_of_current_platform', 'pick_object_25_of_current_platform', 'pick_object_26_of_current_platform']
- Show receptacle actions: ['show_receptacle_of_object_1_of_current_platform', 'show_receptacle_of_object_2_of_current_platform', 'show_receptacle_of_object_3_of_current_platform', 'show_receptacle_of_object_4_of_current_platform', 'show_receptacle_of_object_5_of_current_platform', 'show_receptacle_of_object_6_of_current_platform', 'show_receptacle_of_object_7_of_current_platform', 'show_receptacle_of_object_8_of_current_platform', 'show_receptacle_of_object_9_of_current_platform', 'show_receptacle_of_object_10_of_current_platform', 'show_receptacle_of_object_11_of_current_platform', 'show_receptacle_of_object_12_of_current_platform', 'show_receptacle_of_object_13_of_current_platform', 'show_receptacle_of_object_14_of_current_platform', 'show_receptacle_of_object_15_of_current_platform', 'show_receptacle_of_object_16_of_current_platform', 'show_receptacle_of_object_17_of_current_platform', 'show_receptacle_of_object_18_of_current_platform', 'show_receptacle_of_object_19_of_current_platform', 'show_receptacle_of_object_20_of_current_platform', 'show_receptacle_of_object_21_of_current_platform', 'show_receptacle_of_object_22_of_current_platform', 'show_receptacle_of_object_23_of_current_platform', 'show_receptacle_of_object_24_of_current_platform', 'show_receptacle_of_object_25_of_current_platform', 'show_receptacle_of_object_26_of_current_platform']
- Other actions: CALL_END (Call end - terminate the task), change_view (Change the viewing angle to observe the scene from another perspective)
Here are 4 images, named ['Idle_2_1_out_of_4.png', 'Idle_2_2_out_of_4.png', 'Idle_2_3_out_of_4.png', 'Idle_2_4_out_of_4.png'] respectively.
Their description is as follows: These images show the platform you are currently on in one view, with regions or objects marked with numbers for you to place objects accurately. The platform is object_kitchen_counter_1_body_platform_1.
If the platform has no objects, a 3x3 grid will be marked on the platform to help you place objects, with each grid marked in numbers from 1 to 9. If there are objects on the platform, guiding lines will indicate the object numbers. Note that if you see multiple images, it means the platform is too long to be captured in one image, and it's guaranteed that the same object will marked in THE SAME COLOR GUIDELINES AND THE SAME NUMBER. If you think you can't determine the number of an item in one picture, you can go through other pictures and see if this item is marked more clearly.
VLM Response: pick_object_15_of_current_platform

You are currently at object_kitchen_counter_1_body_platform_1.
And you are holding kitchenware_small_white_mug.
Steps used: 3/20. You can only take at most 20 steps, so hurry if you've almost used all of them!
Your available action space:
- Navigation actions: ['go_to_object_sofa_10_platform_0', 'go_to_object_sofa_10_platform_1', 'go_to_object_sofa_10_platform_2', 'go_to_object_table_04_13_platform_0', 'go_to_object_chair_04_46_platform_0', 'go_to_object_chair_04_47_platform_0', 'go_to_object_chair_05_7_platform_0', 'go_to_object_chair_05_8_platform_0', 'go_to_object_stool_02_18_platform_0', 'go_to_object_stool_02_6_platform_0', 'go_to_object_rack_01_75_platform_0', 'go_to_object_rack_01_75_platform_1', 'go_to_object_rack_01_75_platform_2', 'go_to_object_kitchen_counter_1_body_platform_0', 'go_to_object_kitchen_counter_1_body_platform_1', 'go_to_object_fridge_0_body_platform_1', 'go_to_object_fridge_0_body_platform_3', 'go_to_object_fridge_0_body_platform_4', 'go_to_object_fridge_0_body_platform_5', 'go_to_object_fridge_0_body_platform_6', 'go_to_object_fridge_0_body_platform_7', 'go_to_object_bin_03_3_platform_0', 'go_to_object_wall_cabinet_01_4_platform_0', 'go_to_object_wall_cabinet_01_4_platform_1', 'go_to_object_wall_cabinet_01_4_platform_2', 'go_to_object_wall_cabinet_01_4_platform_3', 'go_to_object_wall_cabinet_01_4_platform_4', 'go_to_object_wall_cabinet_01_4_platform_5', 'go_to_object_wall_cabinet_01_4_platform_6', 'go_to_object_table_03_14_platform_1', 'go_to_object_table_01_48_platform_0', 'go_to_object_wall_cabinet_02_21_platform_0', 'go_to_object_wall_cabinet_02_21_platform_1', 'go_to_object_wall_cabinet_02_21_platform_2', 'go_to_object_wall_cabinet_02_21_platform_3', 'go_to_object_wall_cabinet_02_21_platform_4', 'go_to_object_wall_cabinet_02_21_platform_5', 'go_to_object_wall_cabinet_02_21_platform_6', 'go_to_object_chestOfDrawers_01_2_body_platform_0', 'go_to_object_chestOfDrawers_01_2_body_platform_1', 'go_to_object_chestOfDrawers_01_2_body_platform_2', 'go_to_object_chestOfDrawers_01_2_body_platform_3', 'go_to_object_chestOfDrawers_01_2_body_platform_4', 'go_to_object_chestOfDrawers_01_2_body_platform_5', 'go_to_object_chestOfDrawers_01_2_body_platform_6', 'go_to_object_table_02_40_platform_0', 'go_to_object_table_02_40_platform_1', 'go_to_object_table_02_40_platform_2', 'go_to_object_tvstand_88_platform_0', 'go_to_object_cabinet_3_body_platform_0', 'go_to_object_cabinet_3_body_platform_1']
- Show receptacle actions: ['show_receptacle_of_object_1_of_current_platform', 'show_receptacle_of_object_2_of_current_platform', 'show_receptacle_of_object_3_of_current_platform', 'show_receptacle_of_object_4_of_current_platform', 'show_receptacle_of_object_5_of_current_platform', 'show_receptacle_of_object_6_of_current_platform', 'show_receptacle_of_object_7_of_current_platform', 'show_receptacle_of_object_8_of_current_platform', 'show_receptacle_of_object_9_of_current_platform', 'show_receptacle_of_object_10_of_current_platform', 'show_receptacle_of_object_11_of_current_platform', 'show_receptacle_of_object_12_of_current_platform', 'show_receptacle_of_object_13_of_current_platform', 'show_receptacle_of_object_14_of_current_platform', 'show_receptacle_of_object_15_of_current_platform', 'show_receptacle_of_object_16_of_current_platform', 'show_receptacle_of_object_17_of_current_platform', 'show_receptacle_of_object_18_of_current_platform', 'show_receptacle_of_object_19_of_current_platform', 'show_receptacle_of_object_20_of_current_platform', 'show_receptacle_of_object_21_of_current_platform', 'show_receptacle_of_object_22_of_current_platform', 'show_receptacle_of_object_23_of_current_platform', 'show_receptacle_of_object_24_of_current_platform', 'show_receptacle_of_object_25_of_current_platform']
- Other actions: CALL_END (Call end - terminate the task), change_view (Change the viewing angle to observe the scene from another perspective)
- Place actions: place_r (Place the object in an arbitrary place on the platform), place_s_[({object_idx1},{dir_idx1})...] (Place the object in the union area of regions with indices {(object_idx1,region_idx1)}(object_idx1's region_idx1 space) etc. All available pairs are in [(1, 1), (1, 2), (1, 3), (1, 4), (2, 1), (5, 1), (6, 1), (8, 1), (10, 1), (11, 1), (11, 2), (11, 3), (12, 1), (12, 2), (12, 3), (12, 4), (12, 5), (12, 6), (12, 7), (12, 8), (13, 1), (14, 1), (14, 2), (14, 3), (14, 4), (14, 5), (16, 1), (16, 2), (16, 3), (17, 1), (17, 2), (17, 3), (17, 4), (17, 5), (17, 6), (18, 1), (19, 1), (20, 1), (20, 2), (20, 3), (20, 4), (20, 5), (21, 1), (21, 2), (21, 3), (21, 4), (21, 5), (22, 1), (22, 2), (22, 3), (23, 1), (24, 1), (24, 2), (24, 3), (24, 4), (24, 5), (24, 6), (24, 7), (24, 8), (25, 1), (25, 2)], and a valid choice should be a subset of it)
Here are 4 images, named ['HoldingOccupiedPlatform3_1_out_of_4.png', 'HoldingOccupiedPlatform3_2_out_of_4.png', 'HoldingOccupiedPlatform3_3_out_of_4.png', 'HoldingOccupiedPlatform3_4_out_of_4.png'] respectively.
Their description is as follows: These image show the platform you are currently on in one view, with regions or objects marked with numbers for you to place objects accurately. The platform is object_kitchen_counter_1_body_platform_1.
If the platform has no objects, a 3x3 grid will be marked on the platform to help you place objects, with each grid marked in numbers from 1 to 9. If there are objects on the platform, guiding lines will indicate the object numbers. Note that if you see multiple images, it means the platform is too long to be captured in one image, and it's guaranteed that the same object will marked in THE SAME COLOR GUIDELINES AND THE SAME NUMBER. If you think you can't determine the number of an item in one picture, you can go through other pictures and see if this item is marked more clearly.
VLM Response: place_r

The object has been placed successfully. You can now call end if you think you've finished the task correctly, or can also pick up the object again if you think the placement is not correct.
You are currently at object_kitchen_counter_1_body_platform_1.
And you are holding nothing.
Steps used: 4/20. You can only take at most 20 steps, so hurry if you've almost used all of them!
Your available action space:
- Navigation actions: ['go_to_object_sofa_10_platform_0', 'go_to_object_sofa_10_platform_1', 'go_to_object_sofa_10_platform_2', 'go_to_object_table_04_13_platform_0', 'go_to_object_chair_04_46_platform_0', 'go_to_object_chair_04_47_platform_0', 'go_to_object_chair_05_7_platform_0', 'go_to_object_chair_05_8_platform_0', 'go_to_object_stool_02_18_platform_0', 'go_to_object_stool_02_6_platform_0', 'go_to_object_rack_01_75_platform_0', 'go_to_object_rack_01_75_platform_1', 'go_to_object_rack_01_75_platform_2', 'go_to_object_kitchen_counter_1_body_platform_0', 'go_to_object_kitchen_counter_1_body_platform_1', 'go_to_object_fridge_0_body_platform_1', 'go_to_object_fridge_0_body_platform_3', 'go_to_object_fridge_0_body_platform_4', 'go_to_object_fridge_0_body_platform_5', 'go_to_object_fridge_0_body_platform_6', 'go_to_object_fridge_0_body_platform_7', 'go_to_object_bin_03_3_platform_0', 'go_to_object_wall_cabinet_01_4_platform_0', 'go_to_object_wall_cabinet_01_4_platform_1', 'go_to_object_wall_cabinet_01_4_platform_2', 'go_to_object_wall_cabinet_01_4_platform_3', 'go_to_object_wall_cabinet_01_4_platform_4', 'go_to_object_wall_cabinet_01_4_platform_5', 'go_to_object_wall_cabinet_01_4_platform_6', 'go_to_object_table_03_14_platform_1', 'go_to_object_table_01_48_platform_0', 'go_to_object_wall_cabinet_02_21_platform_0', 'go_to_object_wall_cabinet_02_21_platform_1', 'go_to_object_wall_cabinet_02_21_platform_2', 'go_to_object_wall_cabinet_02_21_platform_3', 'go_to_object_wall_cabinet_02_21_platform_4', 'go_to_object_wall_cabinet_02_21_platform_5', 'go_to_object_wall_cabinet_02_21_platform_6', 'go_to_object_chestOfDrawers_01_2_body_platform_0', 'go_to_object_chestOfDrawers_01_2_body_platform_1', 'go_to_object_chestOfDrawers_01_2_body_platform_2', 'go_to_object_chestOfDrawers_01_2_body_platform_3', 'go_to_object_chestOfDrawers_01_2_body_platform_4', 'go_to_object_chestOfDrawers_01_2_body_platform_5', 'go_to_object_chestOfDrawers_01_2_body_platform_6', 'go_to_object_table_02_40_platform_0', 'go_to_object_table_02_40_platform_1', 'go_to_object_table_02_40_platform_2', 'go_to_object_tvstand_88_platform_0', 'go_to_object_cabinet_3_body_platform_0', 'go_to_object_cabinet_3_body_platform_1']
- Pick object actions: ['pick_object_1_of_current_platform', 'pick_object_2_of_current_platform', 'pick_object_3_of_current_platform', 'pick_object_4_of_current_platform', 'pick_object_5_of_current_platform', 'pick_object_6_of_current_platform', 'pick_object_7_of_current_platform', 'pick_object_8_of_current_platform', 'pick_object_9_of_current_platform', 'pick_object_10_of_current_platform', 'pick_object_11_of_current_platform', 'pick_object_12_of_current_platform', 'pick_object_13_of_current_platform', 'pick_object_14_of_current_platform', 'pick_object_15_of_current_platform', 'pick_object_16_of_current_platform', 'pick_object_17_of_current_platform', 'pick_object_18_of_current_platform', 'pick_object_19_of_current_platform', 'pick_object_20_of_current_platform', 'pick_object_21_of_current_platform', 'pick_object_22_of_current_platform', 'pick_object_23_of_current_platform', 'pick_object_24_of_current_platform', 'pick_object_25_of_current_platform', 'pick_object_26_of_current_platform']
- Show receptacle actions: ['show_receptacle_of_object_1_of_current_platform', 'show_receptacle_of_object_2_of_current_platform', 'show_receptacle_of_object_3_of_current_platform', 'show_receptacle_of_object_4_of_current_platform', 'show_receptacle_of_object_5_of_current_platform', 'show_receptacle_of_object_6_of_current_platform', 'show_receptacle_of_object_7_of_current_platform', 'show_receptacle_of_object_8_of_current_platform', 'show_receptacle_of_object_9_of_current_platform', 'show_receptacle_of_object_10_of_current_platform', 'show_receptacle_of_object_11_of_current_platform', 'show_receptacle_of_object_12_of_current_platform', 'show_receptacle_of_object_13_of_current_platform', 'show_receptacle_of_object_14_of_current_platform', 'show_receptacle_of_object_15_of_current_platform', 'show_receptacle_of_object_16_of_current_platform', 'show_receptacle_of_object_17_of_current_platform', 'show_receptacle_of_object_18_of_current_platform', 'show_receptacle_of_object_19_of_current_platform', 'show_receptacle_of_object_20_of_current_platform', 'show_receptacle_of_object_21_of_current_platform', 'show_receptacle_of_object_22_of_current_platform', 'show_receptacle_of_object_23_of_current_platform', 'show_receptacle_of_object_24_of_current_platform', 'show_receptacle_of_object_25_of_current_platform', 'show_receptacle_of_object_26_of_current_platform']
- Other actions: CALL_END (Call end - terminate the task), change_view (Change the viewing angle to observe the scene from another perspective)
Here are 4 images, named ['Idle_4_1_out_of_4.png', 'Idle_4_2_out_of_4.png', 'Idle_4_3_out_of_4.png', 'Idle_4_4_out_of_4.png'] respectively.
Their description is as follows: These images show the platform you are currently on in one view, with regions or objects marked with numbers for you to place objects accurately. The platform is object_kitchen_counter_1_body_platform_1.
If the platform has no objects, a 3x3 grid will be marked on the platform to help you place objects, with each grid marked in numbers from 1 to 9. If there are objects on the platform, guiding lines will indicate the object numbers. Note that if you see multiple images, it means the platform is too long to be captured in one image, and it's guaranteed that the same object will marked in THE SAME COLOR GUIDELINES AND THE SAME NUMBER. If you think you can't determine the number of an item in one picture, you can go through other pictures and see if this item is marked more clearly.
VLM Response: pick_object_17_of_current_platform

You are currently at object_kitchen_counter_1_body_platform_1.
And you are holding kitchenware_small_white_bowl.
Steps used: 5/20. You can only take at most 20 steps, so hurry if you've almost used all of them!
Your available action space:
- Navigation actions: ['go_to_object_sofa_10_platform_0', 'go_to_object_sofa_10_platform_1', 'go_to_object_sofa_10_platform_2', 'go_to_object_table_04_13_platform_0', 'go_to_object_chair_04_46_platform_0', 'go_to_object_chair_04_47_platform_0', 'go_to_object_chair_05_7_platform_0', 'go_to_object_chair_05_8_platform_0', 'go_to_object_stool_02_18_platform_0', 'go_to_object_stool_02_6_platform_0', 'go_to_object_rack_01_75_platform_0', 'go_to_object_rack_01_75_platform_1', 'go_to_object_rack_01_75_platform_2', 'go_to_object_kitchen_counter_1_body_platform_0', 'go_to_object_kitchen_counter_1_body_platform_1', 'go_to_object_fridge_0_body_platform_1', 'go_to_object_fridge_0_body_platform_3', 'go_to_object_fridge_0_body_platform_4', 'go_to_object_fridge_0_body_platform_5', 'go_to_object_fridge_0_body_platform_6', 'go_to_object_fridge_0_body_platform_7', 'go_to_object_bin_03_3_platform_0', 'go_to_object_wall_cabinet_01_4_platform_0', 'go_to_object_wall_cabinet_01_4_platform_1', 'go_to_object_wall_cabinet_01_4_platform_2', 'go_to_object_wall_cabinet_01_4_platform_3', 'go_to_object_wall_cabinet_01_4_platform_4', 'go_to_object_wall_cabinet_01_4_platform_5', 'go_to_object_wall_cabinet_01_4_platform_6', 'go_to_object_table_03_14_platform_1', 'go_to_object_table_01_48_platform_0', 'go_to_object_wall_cabinet_02_21_platform_0', 'go_to_object_wall_cabinet_02_21_platform_1', 'go_to_object_wall_cabinet_02_21_platform_2', 'go_to_object_wall_cabinet_02_21_platform_3', 'go_to_object_wall_cabinet_02_21_platform_4', 'go_to_object_wall_cabinet_02_21_platform_5', 'go_to_object_wall_cabinet_02_21_platform_6', 'go_to_object_chestOfDrawers_01_2_body_platform_0', 'go_to_object_chestOfDrawers_01_2_body_platform_1', 'go_to_object_chestOfDrawers_01_2_body_platform_2', 'go_to_object_chestOfDrawers_01_2_body_platform_3', 'go_to_object_chestOfDrawers_01_2_body_platform_4', 'go_to_object_chestOfDrawers_01_2_body_platform_5', 'go_to_object_chestOfDrawers_01_2_body_platform_6', 'go_to_object_table_02_40_platform_0', 'go_to_object_table_02_40_platform_1', 'go_to_object_table_02_40_platform_2', 'go_to_object_tvstand_88_platform_0', 'go_to_object_cabinet_3_body_platform_0', 'go_to_object_cabinet_3_body_platform_1']
- Show receptacle actions: ['show_receptacle_of_object_1_of_current_platform', 'show_receptacle_of_object_2_of_current_platform', 'show_receptacle_of_object_3_of_current_platform', 'show_receptacle_of_object_4_of_current_platform', 'show_receptacle_of_object_5_of_current_platform', 'show_receptacle_of_object_6_of_current_platform', 'show_receptacle_of_object_7_of_current_platform', 'show_receptacle_of_object_8_of_current_platform', 'show_receptacle_of_object_9_of_current_platform', 'show_receptacle_of_object_10_of_current_platform', 'show_receptacle_of_object_11_of_current_platform', 'show_receptacle_of_object_12_of_current_platform', 'show_receptacle_of_object_13_of_current_platform', 'show_receptacle_of_object_14_of_current_platform', 'show_receptacle_of_object_15_of_current_platform', 'show_receptacle_of_object_16_of_current_platform', 'show_receptacle_of_object_17_of_current_platform', 'show_receptacle_of_object_18_of_current_platform', 'show_receptacle_of_object_19_of_current_platform', 'show_receptacle_of_object_20_of_current_platform', 'show_receptacle_of_object_21_of_current_platform', 'show_receptacle_of_object_22_of_current_platform', 'show_receptacle_of_object_23_of_current_platform', 'show_receptacle_of_object_24_of_current_platform', 'show_receptacle_of_object_25_of_current_platform']
- Other actions: CALL_END (Call end - terminate the task), change_view (Change the viewing angle to observe the scene from another perspective)
- Place actions: place_r (Place the object in an arbitrary place on the platform), place_s_[({object_idx1},{dir_idx1})...] (Place the object in the union area of regions with indices {(object_idx1,region_idx1)}(object_idx1's region_idx1 space) etc. All available pairs are in [(1, 1), (1, 2), (1, 3), (1, 4), (2, 1), (5, 1), (6, 1), (8, 1), (10, 1), (11, 1), (11, 2), (11, 3), (12, 1), (12, 2), (12, 3), (12, 4), (12, 5), (12, 6), (12, 7), (12, 8), (13, 1), (13, 2), (14, 1), (14, 2), (14, 3), (14, 4), (14, 5), (16, 1), (16, 2), (16, 3), (17, 1), (18, 1), (19, 1), (19, 2), (19, 3), (19, 4), (19, 5), (20, 1), (20, 2), (20, 3), (20, 4), (20, 5), (21, 1), (21, 2), (21, 3), (22, 1), (23, 1), (23, 2), (23, 3), (23, 4), (23, 5), (23, 6), (23, 7), (23, 8), (24, 1), (24, 2), (25, 1), (25, 2), (25, 3)], and a valid choice should be a subset of it)
Here are 4 images, named ['HoldingOccupiedPlatform5_1_out_of_4.png', 'HoldingOccupiedPlatform5_2_out_of_4.png', 'HoldingOccupiedPlatform5_3_out_of_4.png', 'HoldingOccupiedPlatform5_4_out_of_4.png'] respectively.
Their description is as follows: These image show the platform you are currently on in one view, with regions or objects marked with numbers for you to place objects accurately. The platform is object_kitchen_counter_1_body_platform_1.
If the platform has no objects, a 3x3 grid will be marked on the platform to help you place objects, with each grid marked in numbers from 1 to 9. If there are objects on the platform, guiding lines will indicate the object numbers. Note that if you see multiple images, it means the platform is too long to be captured in one image, and it's guaranteed that the same object will marked in THE SAME COLOR GUIDELINES AND THE SAME NUMBER. If you think you can't determine the number of an item in one picture, you can go through other pictures and see if this item is marked more clearly.
VLM Response: place_r

The object has been placed successfully. You can now call end if you think you've finished the task correctly, or can also pick up the object again if you think the placement is not correct.
You are currently at object_kitchen_counter_1_body_platform_1.
And you are holding nothing.
Steps used: 6/20. You can only take at most 20 steps, so hurry if you've almost used all of them!
Your available action space:
- Navigation actions: ['go_to_object_sofa_10_platform_0', 'go_to_object_sofa_10_platform_1', 'go_to_object_sofa_10_platform_2', 'go_to_object_table_04_13_platform_0', 'go_to_object_chair_04_46_platform_0', 'go_to_object_chair_04_47_platform_0', 'go_to_object_chair_05_7_platform_0', 'go_to_object_chair_05_8_platform_0', 'go_to_object_stool_02_18_platform_0', 'go_to_object_stool_02_6_platform_0', 'go_to_object_rack_01_75_platform_0', 'go_to_object_rack_01_75_platform_1', 'go_to_object_rack_01_75_platform_2', 'go_to_object_kitchen_counter_1_body_platform_0', 'go_to_object_kitchen_counter_1_body_platform_1', 'go_to_object_fridge_0_body_platform_1', 'go_to_object_fridge_0_body_platform_3', 'go_to_object_fridge_0_body_platform_4', 'go_to_object_fridge_0_body_platform_5', 'go_to_object_fridge_0_body_platform_6', 'go_to_object_fridge_0_body_platform_7', 'go_to_object_bin_03_3_platform_0', 'go_to_object_wall_cabinet_01_4_platform_0', 'go_to_object_wall_cabinet_01_4_platform_1', 'go_to_object_wall_cabinet_01_4_platform_2', 'go_to_object_wall_cabinet_01_4_platform_3', 'go_to_object_wall_cabinet_01_4_platform_4', 'go_to_object_wall_cabinet_01_4_platform_5', 'go_to_object_wall_cabinet_01_4_platform_6', 'go_to_object_table_03_14_platform_1', 'go_to_object_table_01_48_platform_0', 'go_to_object_wall_cabinet_02_21_platform_0', 'go_to_object_wall_cabinet_02_21_platform_1', 'go_to_object_wall_cabinet_02_21_platform_2', 'go_to_object_wall_cabinet_02_21_platform_3', 'go_to_object_wall_cabinet_02_21_platform_4', 'go_to_object_wall_cabinet_02_21_platform_5', 'go_to_object_wall_cabinet_02_21_platform_6', 'go_to_object_chestOfDrawers_01_2_body_platform_0', 'go_to_object_chestOfDrawers_01_2_body_platform_1', 'go_to_object_chestOfDrawers_01_2_body_platform_2', 'go_to_object_chestOfDrawers_01_2_body_platform_3', 'go_to_object_chestOfDrawers_01_2_body_platform_4', 'go_to_object_chestOfDrawers_01_2_body_platform_5', 'go_to_object_chestOfDrawers_01_2_body_platform_6', 'go_to_object_table_02_40_platform_0', 'go_to_object_table_02_40_platform_1', 'go_to_object_table_02_40_platform_2', 'go_to_object_tvstand_88_platform_0', 'go_to_object_cabinet_3_body_platform_0', 'go_to_object_cabinet_3_body_platform_1']
- Pick object actions: ['pick_object_1_of_current_platform', 'pick_object_2_of_current_platform', 'pick_object_3_of_current_platform', 'pick_object_4_of_current_platform', 'pick_object_5_of_current_platform', 'pick_object_6_of_current_platform', 'pick_object_7_of_current_platform', 'pick_object_8_of_current_platform', 'pick_object_9_of_current_platform', 'pick_object_10_of_current_platform', 'pick_object_11_of_current_platform', 'pick_object_12_of_current_platform', 'pick_object_13_of_current_platform', 'pick_object_14_of_current_platform', 'pick_object_15_of_current_platform', 'pick_object_16_of_current_platform', 'pick_object_17_of_current_platform', 'pick_object_18_of_current_platform', 'pick_object_19_of_current_platform', 'pick_object_20_of_current_platform', 'pick_object_21_of_current_platform', 'pick_object_22_of_current_platform', 'pick_object_23_of_current_platform', 'pick_object_24_of_current_platform', 'pick_object_25_of_current_platform', 'pick_object_26_of_current_platform']
- Show receptacle actions: ['show_receptacle_of_object_1_of_current_platform', 'show_receptacle_of_object_2_of_current_platform', 'show_receptacle_of_object_3_of_current_platform', 'show_receptacle_of_object_4_of_current_platform', 'show_receptacle_of_object_5_of_current_platform', 'show_receptacle_of_object_6_of_current_platform', 'show_receptacle_of_object_7_of_current_platform', 'show_receptacle_of_object_8_of_current_platform', 'show_receptacle_of_object_9_of_current_platform', 'show_receptacle_of_object_10_of_current_platform', 'show_receptacle_of_object_11_of_current_platform', 'show_receptacle_of_object_12_of_current_platform', 'show_receptacle_of_object_13_of_current_platform', 'show_receptacle_of_object_14_of_current_platform', 'show_receptacle_of_object_15_of_current_platform', 'show_receptacle_of_object_16_of_current_platform', 'show_receptacle_of_object_17_of_current_platform', 'show_receptacle_of_object_18_of_current_platform', 'show_receptacle_of_object_19_of_current_platform', 'show_receptacle_of_object_20_of_current_platform', 'show_receptacle_of_object_21_of_current_platform', 'show_receptacle_of_object_22_of_current_platform', 'show_receptacle_of_object_23_of_current_platform', 'show_receptacle_of_object_24_of_current_platform', 'show_receptacle_of_object_25_of_current_platform', 'show_receptacle_of_object_26_of_current_platform']
- Other actions: CALL_END (Call end - terminate the task), change_view (Change the viewing angle to observe the scene from another perspective)
Here are 4 images, named ['Idle_6_1_out_of_4.png', 'Idle_6_2_out_of_4.png', 'Idle_6_3_out_of_4.png', 'Idle_6_4_out_of_4.png'] respectively.
Their description is as follows: These images show the platform you are currently on in one view, with regions or objects marked with numbers for you to place objects accurately. The platform is object_kitchen_counter_1_body_platform_1.
If the platform has no objects, a 3x3 grid will be marked on the platform to help you place objects, with each grid marked in numbers from 1 to 9. If there are objects on the platform, guiding lines will indicate the object numbers. Note that if you see multiple images, it means the platform is too long to be captured in one image, and it's guaranteed that the same object will marked in THE SAME COLOR GUIDELINES AND THE SAME NUMBER. If you think you can't determine the number of an item in one picture, you can go through other pictures and see if this item is marked more clearly.
VLM Response: pick_object_7_of_current_platform

You are currently at object_kitchen_counter_1_body_platform_1.
And you are holding kitchenware_spice_container.
Steps used: 7/20. You can only take at most 20 steps, so hurry if you've almost used all of them!
Your available action space:
- Navigation actions: ['go_to_object_sofa_10_platform_0', 'go_to_object_sofa_10_platform_1', 'go_to_object_sofa_10_platform_2', 'go_to_object_table_04_13_platform_0', 'go_to_object_chair_04_46_platform_0', 'go_to_object_chair_04_47_platform_0', 'go_to_object_chair_05_7_platform_0', 'go_to_object_chair_05_8_platform_0', 'go_to_object_stool_02_18_platform_0', 'go_to_object_stool_02_6_platform_0', 'go_to_object_rack_01_75_platform_0', 'go_to_object_rack_01_75_platform_1', 'go_to_object_rack_01_75_platform_2', 'go_to_object_kitchen_counter_1_body_platform_0', 'go_to_object_kitchen_counter_1_body_platform_1', 'go_to_object_fridge_0_body_platform_1', 'go_to_object_fridge_0_body_platform_3', 'go_to_object_fridge_0_body_platform_4', 'go_to_object_fridge_0_body_platform_5', 'go_to_object_fridge_0_body_platform_6', 'go_to_object_fridge_0_body_platform_7', 'go_to_object_bin_03_3_platform_0', 'go_to_object_wall_cabinet_01_4_platform_0', 'go_to_object_wall_cabinet_01_4_platform_1', 'go_to_object_wall_cabinet_01_4_platform_2', 'go_to_object_wall_cabinet_01_4_platform_3', 'go_to_object_wall_cabinet_01_4_platform_4', 'go_to_object_wall_cabinet_01_4_platform_5', 'go_to_object_wall_cabinet_01_4_platform_6', 'go_to_object_table_03_14_platform_1', 'go_to_object_table_01_48_platform_0', 'go_to_object_wall_cabinet_02_21_platform_0', 'go_to_object_wall_cabinet_02_21_platform_1', 'go_to_object_wall_cabinet_02_21_platform_2', 'go_to_object_wall_cabinet_02_21_platform_3', 'go_to_object_wall_cabinet_02_21_platform_4', 'go_to_object_wall_cabinet_02_21_platform_5', 'go_to_object_wall_cabinet_02_21_platform_6', 'go_to_object_chestOfDrawers_01_2_body_platform_0', 'go_to_object_chestOfDrawers_01_2_body_platform_1', 'go_to_object_chestOfDrawers_01_2_body_platform_2', 'go_to_object_chestOfDrawers_01_2_body_platform_3', 'go_to_object_chestOfDrawers_01_2_body_platform_4', 'go_to_object_chestOfDrawers_01_2_body_platform_5', 'go_to_object_chestOfDrawers_01_2_body_platform_6', 'go_to_object_table_02_40_platform_0', 'go_to_object_table_02_40_platform_1', 'go_to_object_table_02_40_platform_2', 'go_to_object_tvstand_88_platform_0', 'go_to_object_cabinet_3_body_platform_0', 'go_to_object_cabinet_3_body_platform_1']
- Show receptacle actions: ['show_receptacle_of_object_1_of_current_platform', 'show_receptacle_of_object_2_of_current_platform', 'show_receptacle_of_object_3_of_current_platform', 'show_receptacle_of_object_4_of_current_platform', 'show_receptacle_of_object_5_of_current_platform', 'show_receptacle_of_object_6_of_current_platform', 'show_receptacle_of_object_7_of_current_platform', 'show_receptacle_of_object_8_of_current_platform', 'show_receptacle_of_object_9_of_current_platform', 'show_receptacle_of_object_10_of_current_platform', 'show_receptacle_of_object_11_of_current_platform', 'show_receptacle_of_object_12_of_current_platform', 'show_receptacle_of_object_13_of_current_platform', 'show_receptacle_of_object_14_of_current_platform', 'show_receptacle_of_object_15_of_current_platform', 'show_receptacle_of_object_16_of_current_platform', 'show_receptacle_of_object_17_of_current_platform', 'show_receptacle_of_object_18_of_current_platform', 'show_receptacle_of_object_19_of_current_platform', 'show_receptacle_of_object_20_of_current_platform', 'show_receptacle_of_object_21_of_current_platform', 'show_receptacle_of_object_22_of_current_platform', 'show_receptacle_of_object_23_of_current_platform', 'show_receptacle_of_object_24_of_current_platform', 'show_receptacle_of_object_25_of_current_platform']
- Other actions: CALL_END (Call end - terminate the task), change_view (Change the viewing angle to observe the scene from another perspective)
- Place actions: place_r (Place the object in an arbitrary place on the platform), place_s_[({object_idx1},{dir_idx1})...] (Place the object in the union area of regions with indices {(object_idx1,region_idx1)}(object_idx1's region_idx1 space) etc. All available pairs are in [(1, 1), (1, 2), (1, 3), (1, 4), (2, 1), (5, 1), (6, 1), (6, 2), (7, 1), (8, 1), (9, 1), (10, 1), (10, 2), (10, 3), (11, 1), (11, 2), (11, 3), (11, 4), (11, 5), (11, 6), (11, 7), (12, 1), (12, 2), (13, 1), (13, 2), (13, 3), (13, 4), (13, 5), (15, 1), (15, 2), (15, 3), (16, 1), (17, 1), (18, 1), (18, 2), (18, 3), (18, 4), (19, 1), (19, 2), (19, 3), (19, 4), (19, 5), (20, 1), (20, 2), (20, 3), (21, 1), (22, 1), (22, 2), (22, 3), (22, 4), (22, 5), (22, 6), (22, 7), (22, 8), (23, 1), (23, 2), (24, 1), (24, 2), (24, 3), (25, 1), (25, 2), (25, 3), (25, 4), (25, 5)], and a valid choice should be a subset of it)
VLM Response: place_r

The object has been placed successfully. You can now call end if you think you've finished the task correctly, or can also pick up the object again if you think the placement is not correct.
You are currently at object_kitchen_counter_1_body_platform_1.
And you are holding nothing.
Steps used: 8/20. You can only take at most 20 steps, so hurry if you've almost used all of them!
Your available action space:
- Navigation actions: ['go_to_object_sofa_10_platform_0', 'go_to_object_sofa_10_platform_1', 'go_to_object_sofa_10_platform_2', 'go_to_object_table_04_13_platform_0', 'go_to_object_chair_04_46_platform_0', 'go_to_object_chair_04_47_platform_0', 'go_to_object_chair_05_7_platform_0', 'go_to_object_chair_05_8_platform_0', 'go_to_object_stool_02_18_platform_0', 'go_to_object_stool_02_6_platform_0', 'go_to_object_rack_01_75_platform_0', 'go_to_object_rack_01_75_platform_1', 'go_to_object_rack_01_75_platform_2', 'go_to_object_kitchen_counter_1_body_platform_0', 'go_to_object_kitchen_counter_1_body_platform_1', 'go_to_object_fridge_0_body_platform_1', 'go_to_object_fridge_0_body_platform_3', 'go_to_object_fridge_0_body_platform_4', 'go_to_object_fridge_0_body_platform_5', 'go_to_object_fridge_0_body_platform_6', 'go_to_object_fridge_0_body_platform_7', 'go_to_object_bin_03_3_platform_0', 'go_to_object_wall_cabinet_01_4_platform_0', 'go_to_object_wall_cabinet_01_4_platform_1', 'go_to_object_wall_cabinet_01_4_platform_2', 'go_to_object_wall_cabinet_01_4_platform_3', 'go_to_object_wall_cabinet_01_4_platform_4', 'go_to_object_wall_cabinet_01_4_platform_5', 'go_to_object_wall_cabinet_01_4_platform_6', 'go_to_object_table_03_14_platform_1', 'go_to_object_table_01_48_platform_0', 'go_to_object_wall_cabinet_02_21_platform_0', 'go_to_object_wall_cabinet_02_21_platform_1', 'go_to_object_wall_cabinet_02_21_platform_2', 'go_to_object_wall_cabinet_02_21_platform_3', 'go_to_object_wall_cabinet_02_21_platform_4', 'go_to_object_wall_cabinet_02_21_platform_5', 'go_to_object_wall_cabinet_02_21_platform_6', 'go_to_object_chestOfDrawers_01_2_body_platform_0', 'go_to_object_chestOfDrawers_01_2_body_platform_1', 'go_to_object_chestOfDrawers_01_2_body_platform_2', 'go_to_object_chestOfDrawers_01_2_body_platform_3', 'go_to_object_chestOfDrawers_01_2_body_platform_4', 'go_to_object_chestOfDrawers_01_2_body_platform_5', 'go_to_object_chestOfDrawers_01_2_body_platform_6', 'go_to_object_table_02_40_platform_0', 'go_to_object_table_02_40_platform_1', 'go_to_object_table_02_40_platform_2', 'go_to_object_tvstand_88_platform_0', 'go_to_object_cabinet_3_body_platform_0', 'go_to_object_cabinet_3_body_platform_1']
- Pick object actions: ['pick_object_1_of_current_platform', 'pick_object_2_of_current_platform', 'pick_object_3_of_current_platform', 'pick_object_4_of_current_platform', 'pick_object_5_of_current_platform', 'pick_object_6_of_current_platform', 'pick_object_7_of_current_platform', 'pick_object_8_of_current_platform', 'pick_object_9_of_current_platform', 'pick_object_10_of_current_platform', 'pick_object_11_of_current_platform', 'pick_object_12_of_current_platform', 'pick_object_13_of_current_platform', 'pick_object_14_of_current_platform', 'pick_object_15_of_current_platform', 'pick_object_16_of_current_platform', 'pick_object_17_of_current_platform', 'pick_object_18_of_current_platform', 'pick_object_19_of_current_platform', 'pick_object_20_of_current_platform', 'pick_object_21_of_current_platform', 'pick_object_22_of_current_platform', 'pick_object_23_of_current_platform', 'pick_object_24_of_current_platform', 'pick_object_25_of_current_platform', 'pick_object_26_of_current_platform']
- Show receptacle actions: ['show_receptacle_of_object_1_of_current_platform', 'show_receptacle_of_object_2_of_current_platform', 'show_receptacle_of_object_3_of_current_platform', 'show_receptacle_of_object_4_of_current_platform', 'show_receptacle_of_object_5_of_current_platform', 'show_receptacle_of_object_6_of_current_platform', 'show_receptacle_of_object_7_of_current_platform', 'show_receptacle_of_object_8_of_current_platform', 'show_receptacle_of_object_9_of_current_platform', 'show_receptacle_of_object_10_of_current_platform', 'show_receptacle_of_object_11_of_current_platform', 'show_receptacle_of_object_12_of_current_platform', 'show_receptacle_of_object_13_of_current_platform', 'show_receptacle_of_object_14_of_current_platform', 'show_receptacle_of_object_15_of_current_platform', 'show_receptacle_of_object_16_of_current_platform', 'show_receptacle_of_object_17_of_current_platform', 'show_receptacle_of_object_18_of_current_platform', 'show_receptacle_of_object_19_of_current_platform', 'show_receptacle_of_object_20_of_current_platform', 'show_receptacle_of_object_21_of_current_platform', 'show_receptacle_of_object_22_of_current_platform', 'show_receptacle_of_object_23_of_current_platform', 'show_receptacle_of_object_24_of_current_platform', 'show_receptacle_of_object_25_of_current_platform', 'show_receptacle_of_object_26_of_current_platform']
- Other actions: CALL_END (Call end - terminate the task), change_view (Change the viewing angle to observe the scene from another perspective)
Here are 4 images, named ['Idle_8_1_out_of_4.png', 'Idle_8_2_out_of_4.png', 'Idle_8_3_out_of_4.png', 'Idle_8_4_out_of_4.png'] respectively.
Their description is as follows: These images show the platform you are currently on in one view, with regions or objects marked with numbers for you to place objects accurately. The platform is object_kitchen_counter_1_body_platform_1.
If the platform has no objects, a 3x3 grid will be marked on the platform to help you place objects, with each grid marked in numbers from 1 to 9. If there are objects on the platform, guiding lines will indicate the object numbers. Note that if you see multiple images, it means the platform is too long to be captured in one image, and it's guaranteed that the same object will marked in THE SAME COLOR GUIDELINES AND THE SAME NUMBER. If you think you can't determine the number of an item in one picture, you can go through other pictures and see if this item is marked more clearly.
VLM Response: pick_object_1_of_current_platform

You are currently at object_kitchen_counter_1_body_platform_1.
And you are holding kitchenware_white_paper_towel_holder.
Steps used: 9/20. You can only take at most 20 steps, so hurry if you've almost used all of them!
Your available action space:
- Navigation actions: ['go_to_object_sofa_10_platform_0', 'go_to_object_sofa_10_platform_1', 'go_to_object_sofa_10_platform_2', 'go_to_object_table_04_13_platform_0', 'go_to_object_chair_04_46_platform_0', 'go_to_object_chair_04_47_platform_0', 'go_to_object_chair_05_7_platform_0', 'go_to_object_chair_05_8_platform_0', 'go_to_object_stool_02_18_platform_0', 'go_to_object_stool_02_6_platform_0', 'go_to_object_rack_01_75_platform_0', 'go_to_object_rack_01_75_platform_1', 'go_to_object_rack_01_75_platform_2', 'go_to_object_kitchen_counter_1_body_platform_0', 'go_to_object_kitchen_counter_1_body_platform_1', 'go_to_object_fridge_0_body_platform_1', 'go_to_object_fridge_0_body_platform_3', 'go_to_object_fridge_0_body_platform_4', 'go_to_object_fridge_0_body_platform_5', 'go_to_object_fridge_0_body_platform_6', 'go_to_object_fridge_0_body_platform_7', 'go_to_object_bin_03_3_platform_0', 'go_to_object_wall_cabinet_01_4_platform_0', 'go_to_object_wall_cabinet_01_4_platform_1', 'go_to_object_wall_cabinet_01_4_platform_2', 'go_to_object_wall_cabinet_01_4_platform_3', 'go_to_object_wall_cabinet_01_4_platform_4', 'go_to_object_wall_cabinet_01_4_platform_5', 'go_to_object_wall_cabinet_01_4_platform_6', 'go_to_object_table_03_14_platform_1', 'go_to_object_table_01_48_platform_0', 'go_to_object_wall_cabinet_02_21_platform_0', 'go_to_object_wall_cabinet_02_21_platform_1', 'go_to_object_wall_cabinet_02_21_platform_2', 'go_to_object_wall_cabinet_02_21_platform_3', 'go_to_object_wall_cabinet_02_21_platform_4', 'go_to_object_wall_cabinet_02_21_platform_5', 'go_to_object_wall_cabinet_02_21_platform_6', 'go_to_object_chestOfDrawers_01_2_body_platform_0', 'go_to_object_chestOfDrawers_01_2_body_platform_1', 'go_to_object_chestOfDrawers_01_2_body_platform_2', 'go_to_object_chestOfDrawers_01_2_body_platform_3', 'go_to_object_chestOfDrawers_01_2_body_platform_4', 'go_to_object_chestOfDrawers_01_2_body_platform_5', 'go_to_object_chestOfDrawers_01_2_body_platform_6', 'go_to_object_table_02_40_platform_0', 'go_to_object_table_02_40_platform_1', 'go_to_object_table_02_40_platform_2', 'go_to_object_tvstand_88_platform_0', 'go_to_object_cabinet_3_body_platform_0', 'go_to_object_cabinet_3_body_platform_1']
- Show receptacle actions: ['show_receptacle_of_object_1_of_current_platform', 'show_receptacle_of_object_2_of_current_platform', 'show_receptacle_of_object_3_of_current_platform', 'show_receptacle_of_object_4_of_current_platform', 'show_receptacle_of_object_5_of_current_platform', 'show_receptacle_of_object_6_of_current_platform', 'show_receptacle_of_object_7_of_current_platform', 'show_receptacle_of_object_8_of_current_platform', 'show_receptacle_of_object_9_of_current_platform', 'show_receptacle_of_object_10_of_current_platform', 'show_receptacle_of_object_11_of_current_platform', 'show_receptacle_of_object_12_of_current_platform', 'show_receptacle_of_object_13_of_current_platform', 'show_receptacle_of_object_14_of_current_platform', 'show_receptacle_of_object_15_of_current_platform', 'show_receptacle_of_object_16_of_current_platform', 'show_receptacle_of_object_17_of_current_platform', 'show_receptacle_of_object_18_of_current_platform', 'show_receptacle_of_object_19_of_current_platform', 'show_receptacle_of_object_20_of_current_platform', 'show_receptacle_of_object_21_of_current_platform', 'show_receptacle_of_object_22_of_current_platform', 'show_receptacle_of_object_23_of_current_platform', 'show_receptacle_of_object_24_of_current_platform', 'show_receptacle_of_object_25_of_current_platform']
- Other actions: CALL_END (Call end - terminate the task), change_view (Change the viewing angle to observe the scene from another perspective)
- Place actions: place_r (Place the object in an arbitrary place on the platform), place_s_[({object_idx1},{dir_idx1})...] (Place the object in the union area of regions with indices {(object_idx1,region_idx1)}(object_idx1's region_idx1 space) etc. All available pairs are in [(1, 1), (2, 1), (2, 2), (2, 3), (3, 1), (3, 2), (3, 3), (3, 4), (3, 5), (3, 6), (3, 7), (4, 1), (4, 2), (5, 1), (5, 2), (5, 3), (5, 4), (5, 5), (7, 1), (7, 2), (7, 3), (8, 1), (9, 1), (10, 1), (10, 2), (10, 3), (11, 1), (11, 2), (11, 3), (11, 4), (11, 5), (12, 1), (12, 2), (12, 3), (13, 1), (13, 2), (13, 3), (13, 4), (14, 1), (14, 2), (14, 3), (14, 4), (14, 5), (14, 6), (14, 7), (14, 8), (15, 1), (15, 2), (16, 1), (16, 2), (16, 3), (17, 1), (17, 2), (17, 3), (17, 4), (17, 5), (18, 1), (18, 2), (18, 3), (18, 4), (19, 1), (19, 2), (19, 3), (19, 4), (19, 5), (19, 6), (20, 1), (20, 2), (20, 3), (20, 4), (21, 1), (21, 2), (21, 3), (21, 4), (22, 1), (22, 2), (22, 3), (22, 4), (23, 1), (23, 2), (23, 3), (24, 1), (24, 2), (25, 1)], and a valid choice should be a subset of it)
Here are 4 images, named ['HoldingOccupiedPlatform9_1_out_of_4.png', 'HoldingOccupiedPlatform9_2_out_of_4.png', 'HoldingOccupiedPlatform9_3_out_of_4.png', 'HoldingOccupiedPlatform9_4_out_of_4.png'] respectively.
Their description is as follows: These image show the platform you are currently on in one view, with regions or objects marked with numbers for you to place objects accurately. The platform is object_kitchen_counter_1_body_platform_1.
If the platform has no objects, a 3x3 grid will be marked on the platform to help you place objects, with each grid marked in numbers from 1 to 9. If there are objects on the platform, guiding lines will indicate the object numbers. Note that if you see multiple images, it means the platform is too long to be captured in one image, and it's guaranteed that the same object will marked in THE SAME COLOR GUIDELINES AND THE SAME NUMBER. If you think you can't determine the number of an item in one picture, you can go through other pictures and see if this item is marked more clearly.
VLM Response: go_to_object_table_02_40_platform_2
You are currently at object_table_02_40_platform_2.
And you are holding kitchenware_white_paper_towel_holder.
Steps used: 10/20. You can only take at most 20 steps, so hurry if you've almost used all of them!
Your available action space:
- Navigation actions: ['go_to_object_sofa_10_platform_0', 'go_to_object_sofa_10_platform_1', 'go_to_object_sofa_10_platform_2', 'go_to_object_table_04_13_platform_0', 'go_to_object_chair_04_46_platform_0', 'go_to_object_chair_04_47_platform_0', 'go_to_object_chair_05_7_platform_0', 'go_to_object_chair_05_8_platform_0', 'go_to_object_stool_02_18_platform_0', 'go_to_object_stool_02_6_platform_0', 'go_to_object_rack_01_75_platform_0', 'go_to_object_rack_01_75_platform_1', 'go_to_object_rack_01_75_platform_2', 'go_to_object_kitchen_counter_1_body_platform_0', 'go_to_object_kitchen_counter_1_body_platform_1', 'go_to_object_fridge_0_body_platform_1', 'go_to_object_fridge_0_body_platform_3', 'go_to_object_fridge_0_body_platform_4', 'go_to_object_fridge_0_body_platform_5', 'go_to_object_fridge_0_body_platform_6', 'go_to_object_fridge_0_body_platform_7', 'go_to_object_bin_03_3_platform_0', 'go_to_object_wall_cabinet_01_4_platform_0', 'go_to_object_wall_cabinet_01_4_platform_1', 'go_to_object_wall_cabinet_01_4_platform_2', 'go_to_object_wall_cabinet_01_4_platform_3', 'go_to_object_wall_cabinet_01_4_platform_4', 'go_to_object_wall_cabinet_01_4_platform_5', 'go_to_object_wall_cabinet_01_4_platform_6', 'go_to_object_table_03_14_platform_1', 'go_to_object_table_01_48_platform_0', 'go_to_object_wall_cabinet_02_21_platform_0', 'go_to_object_wall_cabinet_02_21_platform_1', 'go_to_object_wall_cabinet_02_21_platform_2', 'go_to_object_wall_cabinet_02_21_platform_3', 'go_to_object_wall_cabinet_02_21_platform_4', 'go_to_object_wall_cabinet_02_21_platform_5', 'go_to_object_wall_cabinet_02_21_platform_6', 'go_to_object_chestOfDrawers_01_2_body_platform_0', 'go_to_object_chestOfDrawers_01_2_body_platform_1', 'go_to_object_chestOfDrawers_01_2_body_platform_2', 'go_to_object_chestOfDrawers_01_2_body_platform_3', 'go_to_object_chestOfDrawers_01_2_body_platform_4', 'go_to_object_chestOfDrawers_01_2_body_platform_5', 'go_to_object_chestOfDrawers_01_2_body_platform_6', 'go_to_object_table_02_40_platform_0', 'go_to_object_table_02_40_platform_1', 'go_to_object_table_02_40_platform_2', 'go_to_object_tvstand_88_platform_0', 'go_to_object_cabinet_3_body_platform_0', 'go_to_object_cabinet_3_body_platform_1']
- Show receptacle actions: ['show_receptacle_of_object_1_of_current_platform', 'show_receptacle_of_object_2_of_current_platform']
- Other actions: CALL_END (Call end - terminate the task), change_view (Change the viewing angle to observe the scene from another perspective)
- Place actions: place_r (Place the object in an arbitrary place on the platform), place_s_[({object_idx1},{dir_idx1})...] (Place the object in the union area of regions with indices {(object_idx1,region_idx1)}(object_idx1's region_idx1 space) etc. All available pairs are in [(1, 1), (1, 2), (1, 3), (1, 4), (1, 5), (1, 6), (1, 7), (1, 8), (2, 1), (2, 2), (2, 3), (2, 4), (2, 5), (2, 6), (2, 7), (2, 8)], and a valid choice should be a subset of it)
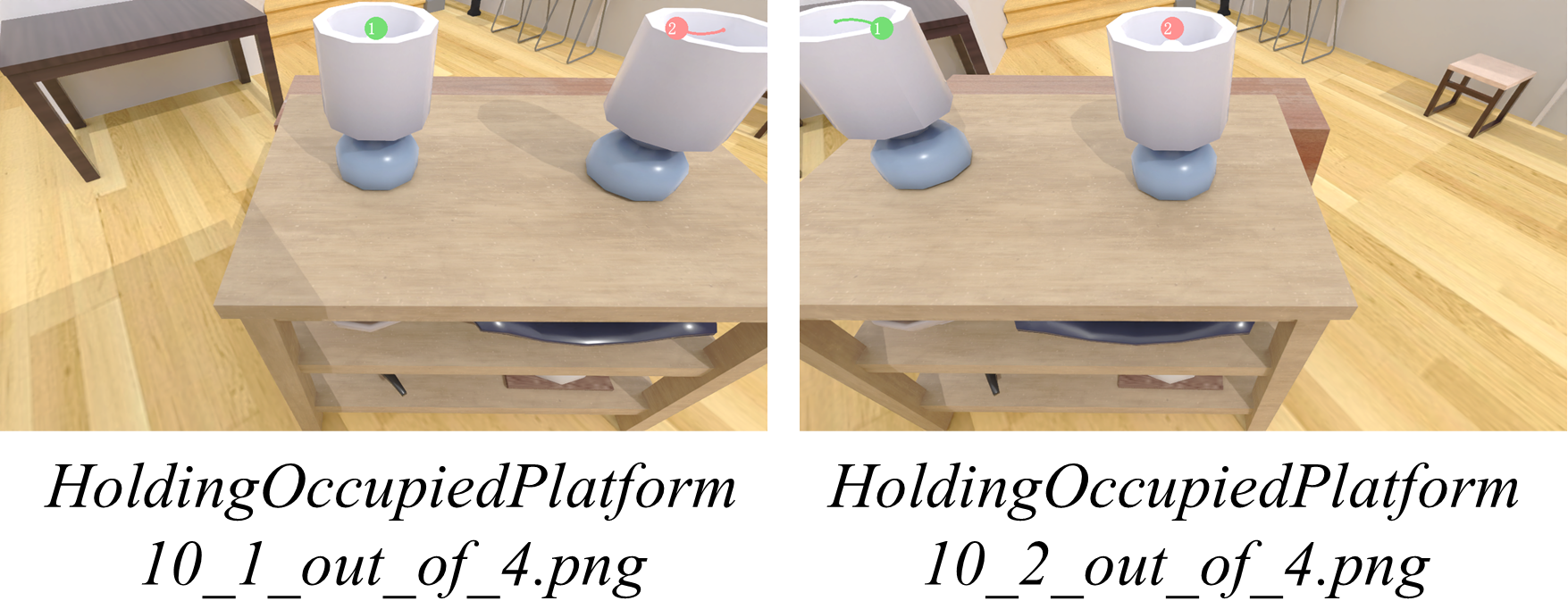
Here are 2 images, named ['HoldingOccupiedPlatform10_1_out_of_2.png', 'HoldingOccupiedPlatform10_2_out_of_2.png'] respectively.
Their description are as follows: These image show the platform you are currently on in one view, with regions or objects marked with numbers for you to place objects accurately. The platform is object_table_02_40_platform_2.
If the platform has no objects, a 3x3 grid will be marked on the platform to help you place objects, with each grid marked in numbers from 1 to 9. If there are objects on the platform, guiding lines will indicate the object numbers. Note that if you see multiple images, it means the platform is too long to be captured in one image, and it's guaranteed that the same object will marked in THE SAME COLOR GUIDELINES AND THE SAME NUMBER. If you think you can't determine the number of an item in one picture, you can go through other pictures and see if this item is marked more clearly.
VLM Response: show_receptacle_of_object_1_of_current_platform

Here are 1 images, named ['ShowReceptacle_11.png'] respectively.
Their description is as follows: This image shows the available receptacles around object 1 on the platform, you see this because you've taken "show_receptacle" action previously. The numbers from 1 to 8 indicate the available receptacles. Not all numbers from 1 to 8 may be present, as some receptacles might be too small or blocked. To use the numbers shown in the image to specify where you want to place the object you are holding, you can include (1, {receptacles_idx} (receptacles_idx in [1, 8]) in the output action.
You are currently at object_table_02_40_platform_2.
And you are holding kitchenware_white_paper_towel_holder.
Steps used: 11/20. You can only take at most 20 steps, so hurry if you've almost used all of them!
Here are 2 images, named ['HoldingOccupiedPlatform11_1_out_of_2.png', 'HoldingOccupiedPlatform11_2_out_of_2.png'] respectively.
Their description are as follows: These images show the platform you are currently on in one view, with regions or objects marked with numbers for you to place objects accurately. The platform is object_table_02_40_platform_2.
If the platform has no objects, a 3x3 grid will be marked on the platform to help you place objects, with each grid marked in numbers from 1 to 9. If there are objects on the platform, guiding lines will indicate the object numbers. Note that if you see multiple images, it means the platform is too long to be captured in one image, and it's guaranteed that the same object will marked in THE SAME COLOR GUIDELINES AND THE SAME NUMBER. If you think you can't determine the number of an item in one picture, you can go through other pictures and see if this item is marked more clearly.
VLM Response: show_receptacle_of_object_2_of_current_platform

Here are 1 images, named ['ShowReceptacle_12.png'] respectively.
Their description is as follows: This image shows the available receptacles around object 1 on the platform, you see this because you've taken "show_receptacle" action previously. The numbers from 1 to 8 indicate the available receptacles. Not all numbers from 1 to 8 may be present, as some receptacles might be too small or blocked. To use the numbers shown in the image to specify where you want to place the object you are holding, you can include (1, {receptacles_idx} (receptacles_idx in [1, 8]) in the output action.
You are currently at object_table_02_40_platform_2.
And you are holding kitchenware_white_paper_towel_holder.
Steps used: 12/20. You can only take at most 20 steps, so hurry if you've almost used all of them!
Here are 2 images, named ['HoldingOccupiedPlatform12_1_out_of_2.png', 'HoldingOccupiedPlatform12_2_out_of_2.png'] respectively.
Their description are as follows: These images show the platform you are currently on in one view, with regions or objects marked with numbers for you to place objects accurately. The platform is object_table_02_40_platform_2.
If the platform has no objects, a 3x3 grid will be marked on the platform to help you place objects, with each grid marked in numbers from 1 to 9. If there are objects on the platform, guiding lines will indicate the object numbers. Note that if you see multiple images, it means the platform is too long to be captured in one image, and it's guaranteed that the same object will marked in THE SAME COLOR GUIDELINES AND THE SAME NUMBER. If you think you can't determine the number of an item in one picture, you can go through other pictures and see if this item is marked more clearly.
VLM Response: place_s_[(1,7),(1,8),(2,3),(2,4)]
The object has been placed successfully. You can now call end if you think you've finished the task correctly, or can also pick up the object again if you think the placement is not correct.
You are currently at object_table_02_40_platform_2.
And you are holding nothing.
Steps used: 13/20. You can only take at most 20 steps, so hurry if you've almost used all of them!
Your available action space:
- Navigation actions: ['go_to_object_sofa_10_platform_0', 'go_to_object_sofa_10_platform_1', 'go_to_object_sofa_10_platform_2', 'go_to_object_table_04_13_platform_0', 'go_to_object_chair_04_46_platform_0', 'go_to_object_chair_04_47_platform_0', 'go_to_object_chair_05_7_platform_0', 'go_to_object_chair_05_8_platform_0', 'go_to_object_stool_02_18_platform_0', 'go_to_object_stool_02_6_platform_0', 'go_to_object_rack_01_75_platform_0', 'go_to_object_rack_01_75_platform_1', 'go_to_object_rack_01_75_platform_2', 'go_to_object_kitchen_counter_1_body_platform_0', 'go_to_object_kitchen_counter_1_body_platform_1', 'go_to_object_fridge_0_body_platform_1', 'go_to_object_fridge_0_body_platform_3', 'go_to_object_fridge_0_body_platform_4', 'go_to_object_fridge_0_body_platform_5', 'go_to_object_fridge_0_body_platform_6', 'go_to_object_fridge_0_body_platform_7', 'go_to_object_bin_03_3_platform_0', 'go_to_object_wall_cabinet_01_4_platform_0', 'go_to_object_wall_cabinet_01_4_platform_1', 'go_to_object_wall_cabinet_01_4_platform_2', 'go_to_object_wall_cabinet_01_4_platform_3', 'go_to_object_wall_cabinet_01_4_platform_4', 'go_to_object_wall_cabinet_01_4_platform_5', 'go_to_object_wall_cabinet_01_4_platform_6', 'go_to_object_table_03_14_platform_1', 'go_to_object_table_01_48_platform_0', 'go_to_object_wall_cabinet_02_21_platform_0', 'go_to_object_wall_cabinet_02_21_platform_1', 'go_to_object_wall_cabinet_02_21_platform_2', 'go_to_object_wall_cabinet_02_21_platform_3', 'go_to_object_wall_cabinet_02_21_platform_4', 'go_to_object_wall_cabinet_02_21_platform_5', 'go_to_object_wall_cabinet_02_21_platform_6', 'go_to_object_chestOfDrawers_01_2_body_platform_0', 'go_to_object_chestOfDrawers_01_2_body_platform_1', 'go_to_object_chestOfDrawers_01_2_body_platform_2', 'go_to_object_chestOfDrawers_01_2_body_platform_3', 'go_to_object_chestOfDrawers_01_2_body_platform_4', 'go_to_object_chestOfDrawers_01_2_body_platform_5', 'go_to_object_chestOfDrawers_01_2_body_platform_6', 'go_to_object_table_02_40_platform_0', 'go_to_object_table_02_40_platform_1', 'go_to_object_table_02_40_platform_2', 'go_to_object_tvstand_88_platform_0', 'go_to_object_cabinet_3_body_platform_0', 'go_to_object_cabinet_3_body_platform_1']
- Pick object actions: ['pick_object_1_of_current_platform', 'pick_object_2_of_current_platform', 'pick_object_3_of_current_platform']
- Show receptacle actions: ['show_receptacle_of_object_1_of_current_platform', 'show_receptacle_of_object_2_of_current_platform', 'show_receptacle_of_object_3_of_current_platform']
- Other actions: CALL_END (Call end - terminate the task), change_view (Change the viewing angle to observe the scene from another perspective)
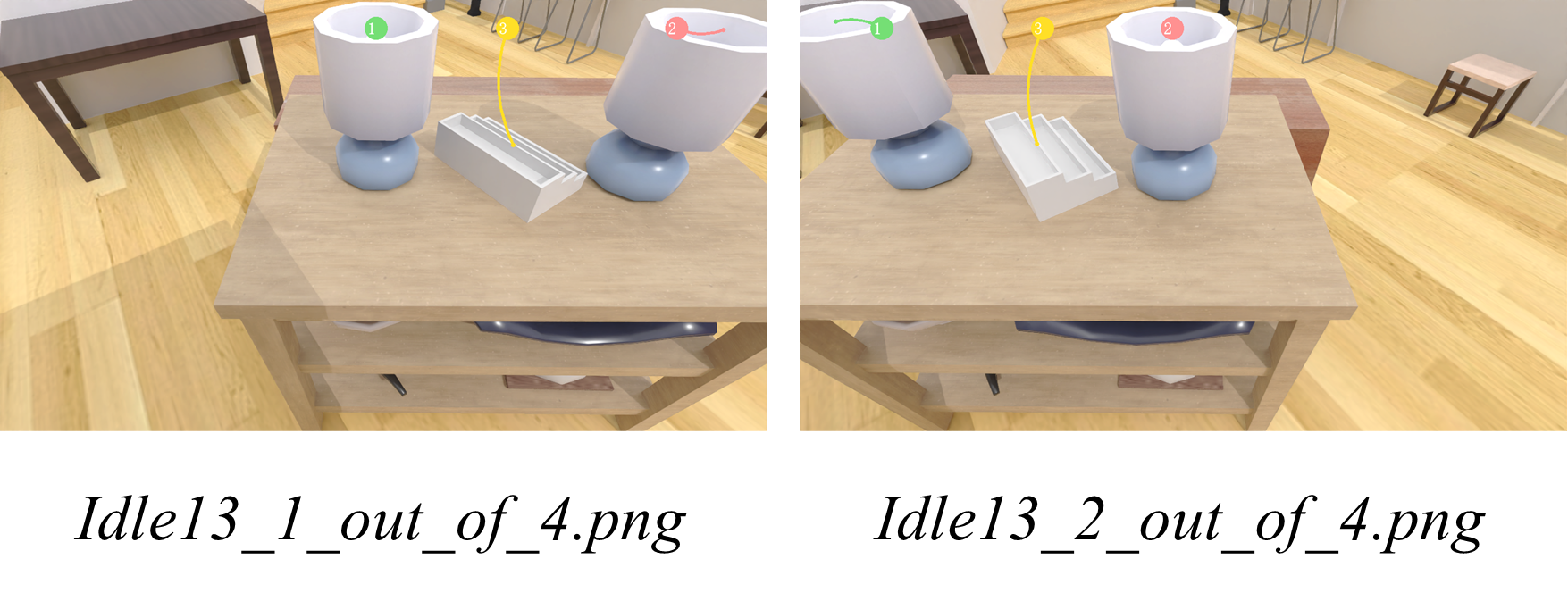
Here are 2 images, named ['Idle_13_1_out_of_2.png', 'Idle_13_2_out_of_2.png'] respectively.
Their description is as follows: These image show the platform you are currently on in one view, with regions or objects marked with numbers for you to place objects accurately. The platform is object_table_02_40_platform_2.
If the platform has no objects, a 3x3 grid will be marked on the platform to help you place objects, with each grid marked in numbers from 1 to 9. If there are objects on the platform, guiding lines will indicate the object numbers. Note that if you see multiple images, it means the platform is too long to be captured in one image, and it's guaranteed that the same object will marked in THE SAME COLOR GUIDELINES AND THE SAME NUMBER. If you think you can't determine the number of an item in one picture, you can go through other pictures and see if this item is marked more clearly.
VLM Response: CALL_END
(call_ended)
Task result: Target object placed between two objects.
Task status: Success
You are a household assistant robot equipped with a vision system and manipulation capabilities. You need to complete a task in a 3D environment, mainly involving moving, picking up, and placing objects. Your goal is to move an object from one place to another correctly according to instructions. Please strictly follow the given Action Space for operations.
At the beginning of each task, you will be informed of a specific task to complete. Throughout the task execution, you will transition between multiple states and have access to a set of possible actions (action space).
You may receive one of the following task types involving one object and another object or a platform. ({an object/another object/a platform} are the name of objects or platforms, {dir} is one of the 8 directions):
- move {an object} to {a platform}.
- move {an object} to the {dir} of {a platform}.
- move {an object} around {another object}.
- move {an object} to the {dir} of {another object}.
- move {an object} between {another object} and {yet another object}.
[expand - Understanding directions]
Understanding directions:
Directions like 'front', 'rear', 'left', and 'right' are defined relative to the robot's perspective and the heading of the object or platform you are interacting with. The heading of a ground object is not fixed and depends on where the robot is standing and facing.
Empty Surfaces (Platforms): When interacting with an empty platform, imagine it divided into a 3x3 grid. The direction aligned with the heading (also, the FARTHEST middle space to you, NOT THE NEAREST MIDDLE SPACE) is labeled "front," with the remaining regions proceeding counterclockwise as "front-left," "left," "rear-left," "rear," "rear-right," "right," and "front-right." The grid is conceptually numbered as follows, based on these directions:
[front-left, front, front-right],
[left, center, right],
[rear-left, rear, rear-right]
Occupied Surfaces (Objects on Platforms): For objects on platforms, imagine extending the edges of the object's bounding box to the platform's boundaries. The resulting regions define the object's 8 receptacles, and the direction is defined similarly.
[expand - Task success criteria]
- move {an object} to {a platform}: The task is considered successful only when {an object} is placed anywhere on the specified platform.
- move {an object} to the {dir} of {a platform}: The task is considered successful only when {an object} is placed on the platform and the geometric center of the placement is in the {dir} direction relative to the platform.
- move {an object} around {another object}: The task is considered successful only when {an object} is placed in any of the receptacles surrounding {another object}.
- move {an object} to the {dir} of {another object}: The task is considered successful only when {an object} is placed in the receptacles surrounding {another object} and overlaps with the {dir} direction.
- move {an object} between {another object} and {yet another object}: The task is considered successful only when {an object} is placed such that it intersects with receptacles in a pair of opposite directions between {another object} and {yet another object}.
Current task:
Move Remote to Bowl's rear-left receptacles
Initially, Remote is on object_hemnes_day_bed_platform_5, and Bowl is on object_dining_table_mella_platform_0.
Steps used: 0/20. You can only take at most 20 steps, so hurry if you've almost used all of them!
Your available action space:
- End action: CALL_END (Call end - terminate the task)
- Navigation actions: ['go_to_object_hemnes_day_bed_platform_5', 'go_to_object_bin_6_platform_0', 'go_to_object_Side_Table_317_1_platform_1', 'go_to_object_side_table_strind_platform_0', 'go_to_object_side_table_strind_platform_1', 'go_to_object_Side_Table_203_1_platform_0', 'go_to_object_Side_Table_203_1_platform_1', 'go_to_object_chair_antnas_platform_0', 'go_to_object_dresser_birkeland_platform_0', 'go_to_object_dresser_birkeland_platform_1', 'go_to_object_dresser_birkeland_platform_2', 'go_to_object_dresser_birkeland_platform_3', 'go_to_object_dresser_birkeland_platform_4', 'go_to_object_dresser_birkeland_platform_5', 'go_to_object_dresser_birkeland_platform_6', 'go_to_object_Basketball_1_platform_0', 'go_to_object_dining_table_mella_platform_0', 'go_to_object_Floor_Lamp_13_platform_0', 'go_to_object_armchair_emmabo_platform_0', 'go_to_object_BaseballBat_2_platform_0']
VLM Response: go_to_object_hemnes_day_bed_platform_5
You are currently at object_hemnes_day_bed_platform_5.
And you are holding nothing.
Steps used: 1/20. You can only take at most 20 steps, so hurry if you've almost used all of them!
Your available action space:
- Navigation actions: ['go_to_object_hemnes_day_bed_platform_5', 'go_to_object_bin_6_platform_0', 'go_to_object_Side_Table_317_1_platform_1', 'go_to_object_side_table_strind_platform_0', 'go_to_object_side_table_strind_platform_1', 'go_to_object_Side_Table_203_1_platform_0', 'go_to_object_Side_Table_203_1_platform_1', 'go_to_object_chair_antnas_platform_0', 'go_to_object_dresser_birkeland_platform_0', 'go_to_object_dresser_birkeland_platform_1', 'go_to_object_dresser_birkeland_platform_2', 'go_to_object_dresser_birkeland_platform_3', 'go_to_object_dresser_birkeland_platform_4', 'go_to_object_dresser_birkeland_platform_5', 'go_to_object_dresser_birkeland_platform_6', 'go_to_object_Basketball_1_platform_0', 'go_to_object_dining_table_mella_platform_0', 'go_to_object_Floor_Lamp_13_platform_0', 'go_to_object_armchair_emmabo_platform_0', 'go_to_object_BaseballBat_2_platform_0']
- Pick object actions: ['pick_object_1_of_current_platform', 'pick_object_2_of_current_platform', 'pick_object_3_of_current_platform', 'pick_object_4_of_current_platform', 'pick_object_5_of_current_platform']
- Show receptacle actions: ['show_receptacles_of_object_1_of_current_platform', 'show_receptacles_of_object_2_of_current_platform', 'show_receptacles_of_object_3_of_current_platform', 'show_receptacles_of_object_4_of_current_platform', 'show_receptacles_of_object_5_of_current_platform']
- Other actions: CALL_END (Call end - terminate the task), rotate_observation_view_of_current_platform (Change the viewing angle to observe the scene from another perspective)
Here are 3 images, named ['Idle_1_1_out_of_3.png', 'Idle_1_2_out_of_3.png', 'Idle_1_3_out_of_3.png'] respectively.
Their description is as follows: These images show the platform you are currently on in one view, with regions or objects marked with numbers for you to place objects accurately. The platform is object_hemnes_day_bed_platform_5.
VLM Response: pick_object_5_of_current_platform
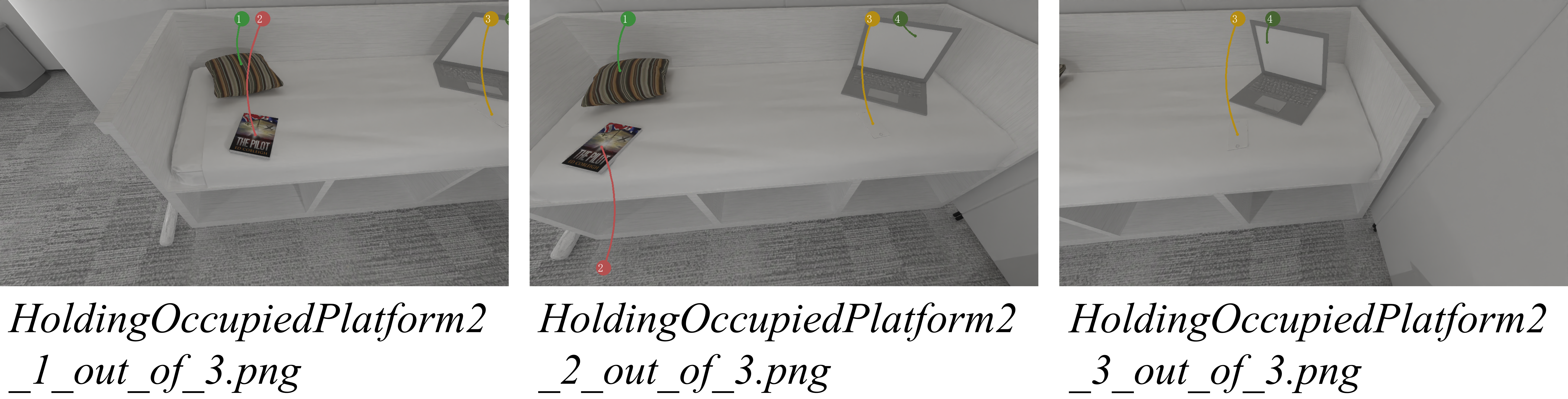
You are currently at object_hemnes_day_bed_platform_5.
And you are holding Remote.
Steps used: 2/20. You can only take at most 20 steps, so hurry if you've almost used all of them!
Here are 3 images, named ['HoldingOccupiedPlatformState_2_1_out_of_3.png', 'HoldingOccupiedPlatformState_2_2_out_of_3.png', 'HoldingOccupiedPlatformState_2_3_out_of_3.png'] respectively.
Their description is as follows: This image shows the platform you are currently on in one view, with regions or objects marked with numbers for you to place objects accurately. The platform is object_hemnes_day_bed_platform_5.
VLM Response: go_to_object_dining_table_mella_platform_0
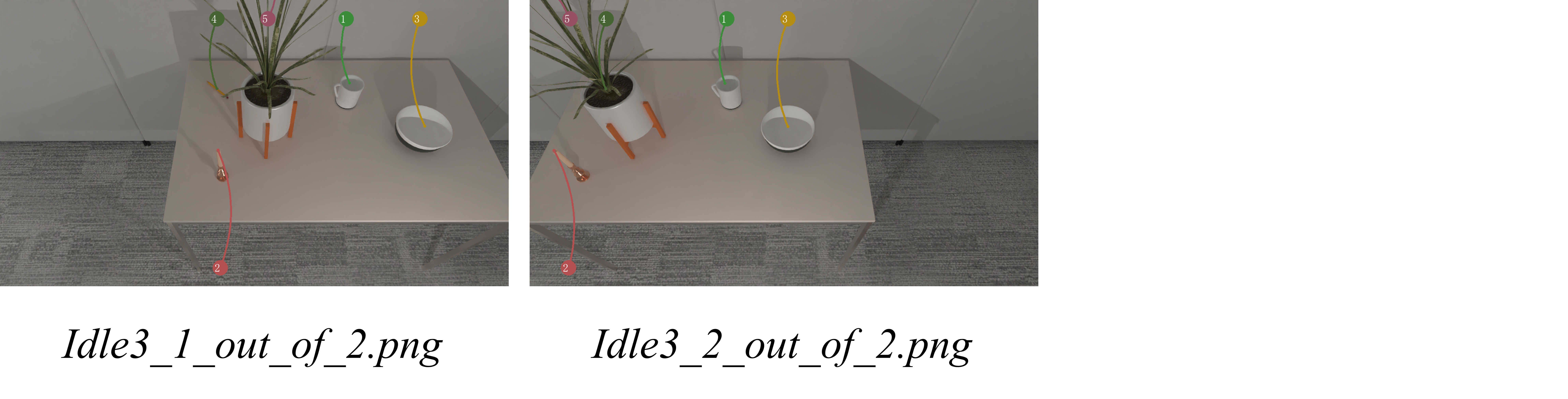
You are currently at object_dining_table_mella_platform_0.
And you are holding Remote.
Steps used: 3/20. You can only take at most 20 steps, so hurry if you've almost used all of them!
Your available action space:
- Navigation actions: ['go_to_object_hemnes_day_bed_platform_5', 'go_to_object_bin_6_platform_0', 'go_to_object_Side_Table_317_1_platform_1', 'go_to_object_side_table_strind_platform_0', 'go_to_object_side_table_strind_platform_1', 'go_to_object_Side_Table_203_1_platform_0', 'go_to_object_Side_Table_203_1_platform_1', 'go_to_object_chair_antnas_platform_0', 'go_to_object_dresser_birkeland_platform_0', 'go_to_object_dresser_birkeland_platform_1', 'go_to_object_dresser_birkeland_platform_2', 'go_to_object_dresser_birkeland_platform_3', 'go_to_object_dresser_birkeland_platform_4', 'go_to_object_dresser_birkeland_platform_5', 'go_to_object_dresser_birkeland_platform_6', 'go_to_object_Basketball_1_platform_0', 'go_to_object_dining_table_mella_platform_0', 'go_to_object_Floor_Lamp_13_platform_0', 'go_to_object_armchair_emmabo_platform_0', 'go_to_object_BaseballBat_2_platform_0']
- Show receptacle actions: ['show_receptacles_of_object_1_of_current_platform', 'show_receptacles_of_object_2_of_current_platform', 'show_receptacles_of_object_3_of_current_platform', 'show_receptacles_of_object_4_of_current_platform', 'show_receptacles_of_object_5_of_current_platform']
- Other actions: CALL_END (Call end - terminate the task), rotate_observation_view_of_current_platform (Change the viewing angle to observe the scene from another perspective)
- Place actions: place_r (Place the object in an arbitrary place on the platform), place_s_[({object_idx1},{dir_idx1})...] (Place the object in the union area of regions with indices {(object_idx1,region_idx1)}(object_idx1's region_idx1 space) etc. All available pairs are in [(1, 1), (1, 2), (1, 3), (1, 4), (1, 5), (1, 6), (1, 7), (1, 8), (2, 1), (2, 2), (2, 3), (2, 4), (2, 5), (3, 1), (3, 2), (3, 3), (3, 4), (3, 5), (3, 6), (3, 7), (3, 8), (4, 1), (4, 2), (4, 3), (4, 4), (4, 5), (4, 6), (4, 7), (5, 1), (5, 2), (5, 3), (5, 4), (5, 5)], and a valid choice should be a subset of it)
Here are 2 images, named ['HoldingOccupiedPlatform_3_1_out_of_2.png', 'HoldingOccupiedPlatform_3_2_out_of_2.png'] respectively.
Their description is as follows: This image shows the platform you are currently on in one view, with regions or objects marked with numbers for you to place objects accurately. The platform is object_dining_table_mella_platform_0.
VLM Response: show_receptacle_of_object_5_of_current_platform

Here are 1 images, named ['ShowReceptacle_4.png'] respectively.
Their description is as follows: This image shows the available receptacles around object 3 on the platform, you see this because you've taken "show_receptacles" action previously. The numbers from 1 to 8 indicate the available receptacles. Not all numbers from 1 to 8 may be present, as some receptacles might be too small or blocked. To use the numbers shown in the image to specify where you want to place the object you are holding, you can include (3, {receptacles_idx} (receptacles_idx in [1, 8]) in the output action.
You are currently at object_dining_table_mella_platform_0.
And you are holding Remote.
Steps used: 4/20. You can only take at most 20 steps, so hurry if you've almost used all of them!
Here are 2 images, named ['HoldingOccupiedPlatform4_1_out_of_2.png', 'HoldingOccupiedPlatform4_2_out_of_2.png'] respectively.
Their description is as follows: This image shows the platform you are currently on in one view, with regions or objects marked with numbers for you to place objects accurately. The platform is object_dining_table_mella_platform_0.
VLM Response: place_s_[(3,8)]
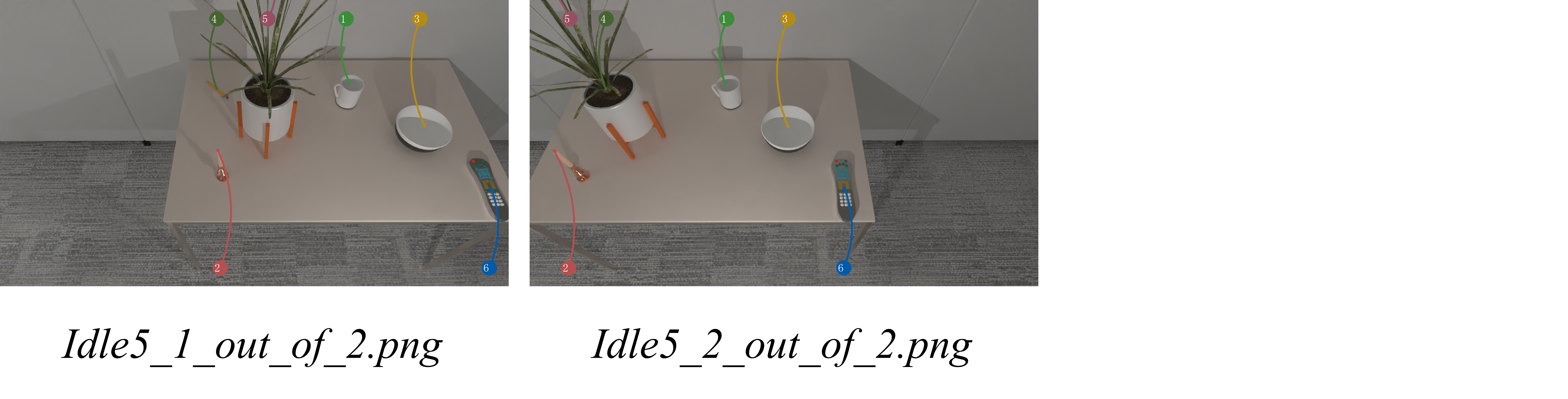
The object has been placed successfully. You can now call end if you think you've finished the task correctly, or can also pick up the object again if you think the placement is not correct.
You are currently at object_dining_table_mella_platform_0.
And you are holding nothing.
Steps used: 5/20. You can only take at most 20 steps, so hurry if you've almost used all of them!
Your available action space:
- Navigation actions: ['go_to_object_hemnes_day_bed_platform_5', 'go_to_object_bin_6_platform_0', 'go_to_object_Side_Table_317_1_platform_1', 'go_to_object_side_table_strind_platform_0', 'go_to_object_side_table_strind_platform_1', 'go_to_object_Side_Table_203_1_platform_0', 'go_to_object_Side_Table_203_1_platform_1', 'go_to_object_chair_antnas_platform_0', 'go_to_object_dresser_birkeland_platform_0', 'go_to_object_dresser_birkeland_platform_1', 'go_to_object_dresser_birkeland_platform_2', 'go_to_object_dresser_birkeland_platform_3', 'go_to_object_dresser_birkeland_platform_4', 'go_to_object_dresser_birkeland_platform_5', 'go_to_object_dresser_birkeland_platform_6', 'go_to_object_Basketball_1_platform_0', 'go_to_object_dining_table_mella_platform_0', 'go_to_object_Floor_Lamp_13_platform_0', 'go_to_object_armchair_emmabo_platform_0', 'go_to_object_BaseballBat_2_platform_0']
- Pick object actions: ['pick_object_1_of_current_platform', 'pick_object_2_of_current_platform', 'pick_object_3_of_current_platform', 'pick_object_4_of_current_platform', 'pick_object_5_of_current_platform', 'pick_object_6_of_current_platform']
- Show receptacle actions: ['show_receptacles_of_object_1_of_current_platform', 'show_receptacles_of_object_2_of_current_platform', 'show_receptacles_of_object_3_of_current_platform', 'show_receptacles_of_object_4_of_current_platform', 'show_receptacles_of_object_5_of_current_platform', 'show_receptacles_of_object_6_of_current_platform']
- Other actions: CALL_END (Call end - terminate the task), rotate_observation_view_of_current_platform (Change the viewing angle to observe the scene from another perspective)
Here are 2 images, named ['Idle_5_1_out_of_2.png', 'Idle_5_2_out_of_2.png'] respectively.
Their description is as follows: This image shows the platform you are currently on in one view, with regions or objects marked with numbers for you to place objects accurately. The platform is object_dining_table_mella_platform_0.
VLM Response: CALL_END
(call_ended)
Task result: Target object placed in wrong direction, expected: rear-left, found: rear-right.
Task status: Failed
Benchmarking Results
We observe that all models achieve a low average SR (under 30%), significantly below human-level performance. Performance generally decreases with increasing task difficulty. Longer tasks (Level 3) lead to significantly lower performance compared to single-step tasks, highlighting the substantial challenge posed by the generated tasks.
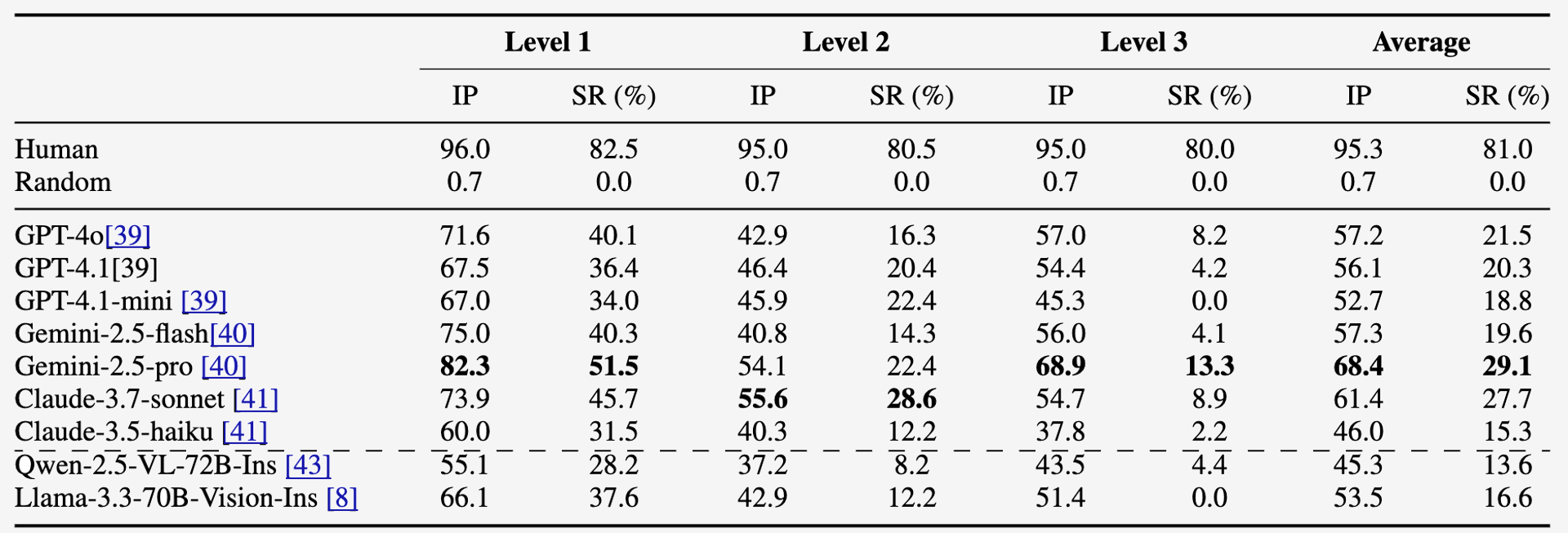
We visualize the sub-step mistake distribution from Gemini-2.5-pro for Level 3 tasks. The Sankey diagram below illustrates that wrong placement accounts for the largest proportion of mistakes, and the navigation mistakes become more frequent in the later steps of the episode. The observation elaborates that longer horizon tasks pose more challenges for VLM agents.
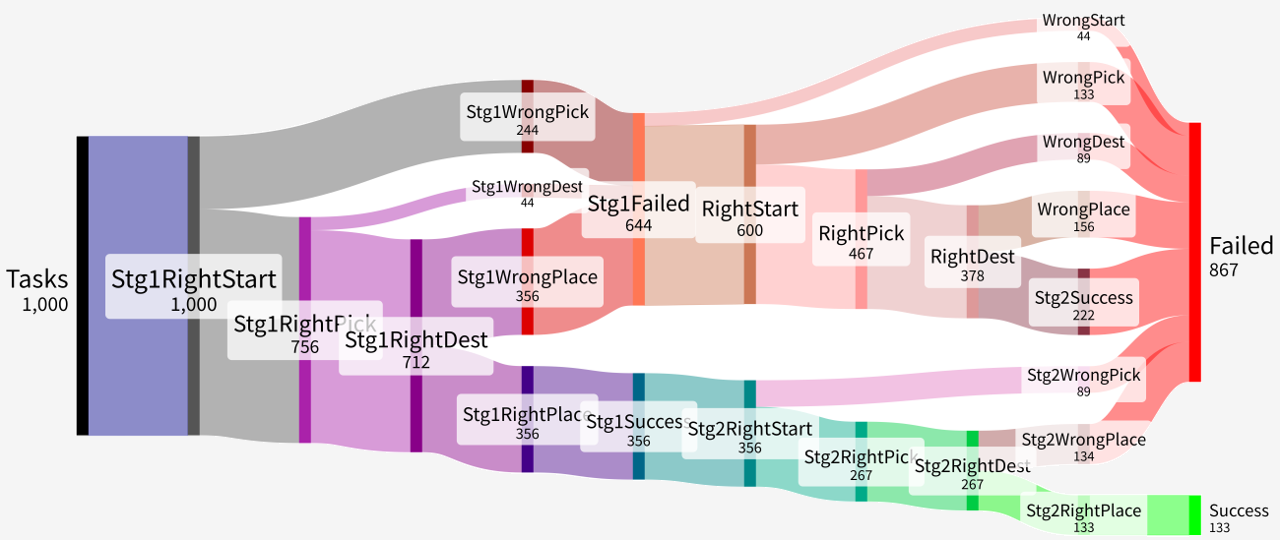
Improving VLM Agents
ManiTaskGen tasks can not only be used for benchmarking VLMs, but also for optimizing VLM-based agents. We adopt a Reflexion-based method to achieve inference-time finetuning of VLM agents.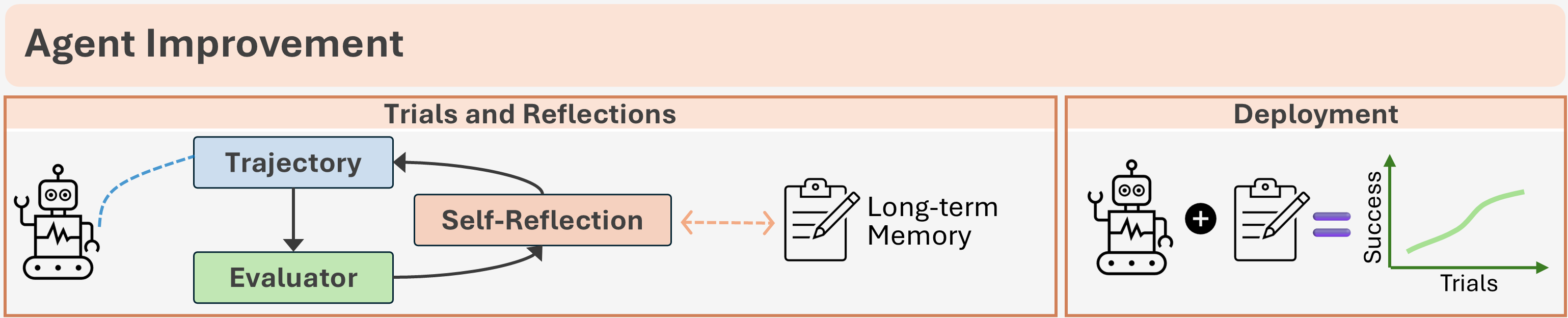 As shown by our experiment results, our optimization significantly improved both the task execution success rate and the Intermediate Points score.
Besides, more trial episodes continuously contribute to the agent performance.
As shown by our experiment results, our optimization significantly improved both the task execution success rate and the Intermediate Points score.
Besides, more trial episodes continuously contribute to the agent performance.

Paper
Code